Как заставить работать магнитное поле?
Для движения поезда необходимо обеспечить поддержку (подвешивание) его над рельсами, устойчивость его при боковых возмущениях, вызванных ветром или при движении по криволинейным участкам пути, а также тяговое усилие для его нормального перемещения. Некоторые из этих функций в обычном железнодорожном поезде осуществляет колесо.
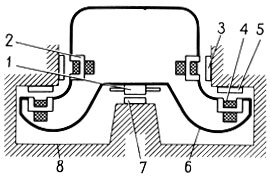
Рис. 18. Схема вагона с электромагнитной системой, в которой функции подвешивания и направления различны: 1 - статор ОЛАД; 2 - электромагнит вагона для направления; 3 - путевой феррорельс направления; 4 - электромагнит вагона для подвешивания; 5 - путевой феррорельс подвески; 6 - вагон; 7 - вторичный элемент ОЛАД; 8 - путевое полотно
В бесконтактном транспорте на магнитной подвеске (МП) с этими задачами успешно справляются магнитные (электромагнитные) поля. Эти поля подвешивают вагон, заставляя парить, направляют его, а также перемещают с заданной скоростью. Для осуществления этих задач в общем случае создают три технические системы: систему магнитной подвески, систему направления и систему тягового привода. На практике эти системы часто функционально объединяют в различных сочетаниях (рис. 18- 20). Поезда, в которых используют эти системы МП, называют магнитолетами или магнитопланами.
В разработанных проектах и построенных опытных вагонах магнитопланов применяют три типа систем МП и направления: на постоянных магнитах, электромагнитную систему и, наконец, электродинамическую (возможны их комбинации).
Система МП с постоянными магнитами (рис. 21) основана на свойстве взаимного отталкивания одноименных полюсов этих магнитов. Такая система неустойчива в горизонтальной плоскости, в чем нетрудно убедиться, держа в руках и сближая одноименные полюса постоянных магнитов, взятых, например, из детского конструктора. Магниты стараются как бы вывернуться. Для придания им устойчивости необходима дополнительная система, действующая в этой плоскости, например механическая или электромагнитная. Поэтому в конструкции пути предусматривают полосы из постоянных магнитов. Аналогичные постоянные магниты также устанавливают на вагоне. Благодаря взаимодействию сил отталкивания между магнитами пути и вагона последний "парит" над магнитными "рельсами". Для его поперечной стабилизации предназначены нейлоновые колеса.
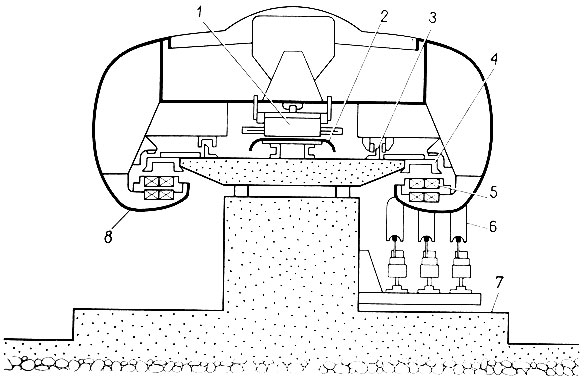
Рис. 19. Конструктивная схема вагона HSST (Япония) с электромагнитной системой, в которой совмещены функции подвешивания и направления: 1 - статор ОЛАД; 2 - вторичная часть ОЛАД в виде реактивной шины; 3 - тормозной рельс; 4 - путевой феррорельс П-образного поперечного сечения для подвешивания и направления вагона; 5 - электромагниты вагона для создания усилий подвеса и направления; 6 - устройства токосъема; 7 - эстакада; 8 - вагон
Для создания подвески на постоянных магнитах не требуется подводить энергию. Этот фактор является ее несомненным достоинством. Недостаток этой системы МП - малый зазор между вагоном и путевым полотном (менее 10 мм). Отсюда очень высокие требования к точности изготовления пути, что приводит к высоким затратам как на его строительство, так и на техническое обслуживание. Кроме того, магниты хрупки и могут размагнититься от действия магнитных полей других устройств транспортной системы. Поэтому в настоящее время системы МП на постоянных магнитах применяют ограниченно и в основном совместно с электромагнитной системой.
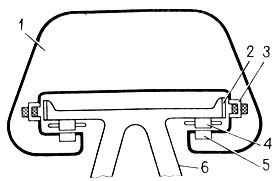
Рис. 20. Схема вагона с электромагнитной системой ('Транс-рапид-06', ФРГ), в которой совмещены функции тяги и подвешивания: 1 - вагон; 2 - путевой феррорельс, направления; 3 - электромагнит вагона для направления; 4 - статор линейного синхронного двигателя (ЛСД) с обмотками в путевом полотне; 5 - электромагнит вагона для подвешивания, а также системы возбуждения ЛСД; 6 - эстакада
Электромагнитная система МП основана на свойстве магнита или электромагнита притягиваться к железной (ферромагнитной) полосе. Если взять уже упомянутый магнит и подвести его к железному предмету, то магнит будет притягиваться к последнему, причем чем ближе к предмету магнит, тем больше сила притяжения. Так же действует и электромагнит, в котором сила притяжения зависит не только от зазора между железной (стальной) полосой и электромагнитом, но и от силы тока в нем. Таким образом, если в конструкции пути установить стальные полосы, а на вагоне разместить электромагниты, то при равенстве силы притяжения и веса вагона последний как бы оказывается в подвешенном состоянии. Отсюда, собственно, и появился термин "магнитная подвеска". Так как зазор между рельсами пути и вагоном в процессе движения меняется, непостоянна также и масса вагона, то необходимо регулировать силу тока электромагнита. Для этого на вагоне устанавливают специальную автоматическую следящую систему, управляемую ЭВМ. Чтобы масса и мощность электромагнитов не были очень большими, зазор между электромагнитами и рельсами пути должен составлять (в современных конструкциях) 10-15 мм. При таких зазорах затраты мощности на подвешивание составляют лишь 1-3 кВт на 1 т груза, что является преимуществом электромагнитной системы МП. Путевое полотно системы МП этого типа также просто по конструкции, сравнительно низка его стоимость, возможна работа электромагнитной системы МП при нулевой скорости вагона. Для реализации этой системы МП необходимо уже освоенное промышленностью оборудование. Основной недостаток системы МП этого типа - необходимость поддерживать малый воздушный зазор.
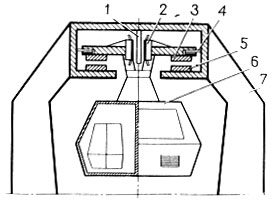
Рис 21. Схема вагона с под веской на постоянных магнитах: 1 вторичный элемент линейного синхронного двигателя (ЛАД); 2 - статор ЛАД; 3 - постоянные магниты вагона; 4 - колеса для на-правления вагона; 5 - постоянные магниты пути; 6 - вагон; 7 - путь в виде эстакады
Электромагнитную систему МП (как электромагнитную систему направления) широко применяют. Теоретически системы могут работать во всем диапазоне скоростей (от 0 до 500 км/ч), но они более перспективны для городского и пригородного транспорта, где максимальная скорость ограничена 300 км/ч: при больших скоростях сложнее обеспечить бесконтактное движение при малых зазорах. Но специалисты ФРГ уже построили и испытали транспортные средства с системами электромагнитного подвешивания для скоростей до 400 км/ч. Недостаток этой системы МП и в том, что необходимо предусматривать на борту автономный источник электропитания (например, аккумуляторную батарею), чтобы в случае аварии внешнего электроснабжения подпитывать током подъемные и направляющие электромагниты до полной остановки поезда, иначе вагоны упадут на путь.
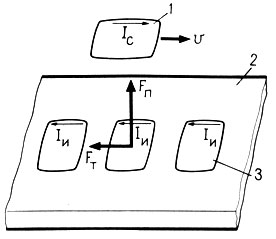
Рис. 22. Схема возникновения электродинамического подвешивания: 1 - источник электромагнитного поля - сверхпроводящий электромагнит (на вагоне) с током Iс; 2 - проводящая ток путевая полоса (из алюминия, меди); 3 - токи Iи, индуктируемые в полосе
Электродинамическая система МП основана на явлении, известном еще из курса физики. Если над полосой или замкнутыми контурами из проводящего ток материала (медь, алюминий) перемещать источник электромагнитного поля, то в полосе (или контурах) наводятся токи индукции. Эти токи образуют свое электромагнитное поле. В результате взаимодействия этого поля с первичным образуется подъемная сила Fп, направленная вверх, а также тормозная сила FT, препятствующая движению (рис. 22). С ростом скорости и источника первичного электромагнитного поля растет и подъемная сила, являющаяся силой отталкивания, а тормозная сила, достигая наибольшего значения при скоростях порядка 30-50 км/ч, затем падает (рис. 23).
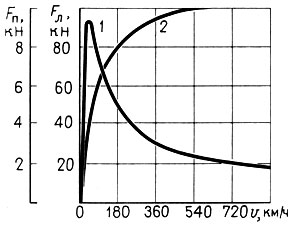
Рис. 23. Зависимость подъемной и тормозной сил от скорости вагона и для электродинамической системы МП: 1 - тормозная сила Fsubт/sub; 2 - подъемная сила Fп
Обычно на транспортном средстве устанавливают тромагнит (источник поля), а в путевом устройстве - проводящую полосу или контуры. Для подъема вагона требуется мощное электромагнитное поле; для его создания применяют электромагниты со сверхпроводящими обмотками (сверхпроводящие магниты).
Вспомним, в чем состоит явление сверхпроводимости.
Еще со школьной скамьи известно, что каждое вещество имеет электрическое сопротивление, поэтому при прохождении тока по проводнику происходит потеря энергии, в результате чего разогревается проводник. Для создания мощных электромагнитных полей требуется большое значение силы тока. Но при этом тепловыделение будет значительным, и катушка магнита из традиционных материалов не выдержит - сгорит. Другое дело, если бы сопротивление обмотки было равно нулю. Если в такую обмотку подать электрический ток, то он будет протекать в ней без изменения бесконечно долго, практически потери энергии не будет.
В 1911 г. голландский физик Камерлинг-Оннес впервые обнаружил, что при очень низких температурах, близких к абсолютному нулю (минус 273 °С), сопротивление ртути электрическому току исчезает. Температуру, при которой исчезает это сопротивление, называют критической. Вот как объясняет явление сверхпроводимости крупнейший специалист в этой области академик В. Л. Гинзбург: "Ток, как известно, это движение электронов. Под влиянием напряжения они начинают "течь" по проводнику. Но при этом постоянно сталкиваются с кристаллической решеткой и тормозятся. И чтобы они совсем не останавливались, их нужно все время "подгонять" - подпитывать энергией. В сверхпроводниках те же самые электроны образуют некое коллективное состояние и начинают проходить через все препятствия. Их нужно лишь однажды "подтолкнуть", а дальше они будут бегать сами".
В проектах и построенных экспериментальных вагонах магнитопланов для обмоток сверхпроводящих электромагнитов применяют сплавы некоторых металлов, охлаждаемые до критической температуры менее 10 К (или -263° С). Такое охлаждение можно получить, если обмотку из сверхпроводящего провода опустить в жидкий гелий. Для поддержания таких низких температур необходима довольно сложная и дорогая система охлаждения (криогенная система).
Однако следует отметить, что физики, комбинируя различные материалы, не теряли надежды получить эффект сверхпроводимости при более высоких температурах.
В последнее время созданы достаточно устойчивые материалы на базе металлокерамики (например, иттриевой керамики), у которых явление сверхпроводимости наступает при температуре 100-110 К. А при такой температуре для охлаждения может быть использован дешевый жидкий азот. Технология получения этого газа проста и хорошо известна. А запасы в атмосфере практически неограничены. Считают, что сверхпроводящие устройства на базе жидкого азота будут в 100 раз и более дешевле. Однако есть ряд достаточно сложных для решения технических вопросов при использовании металлокерамики в качестве сверхпроводящего материала для электромагнитов, например, как из хрупкой керамики сделать проволоку, и т. д. Но и здесь, вероятно, можно найти решение: измельчить эту керамику в порошок, а затем создать из нее проволоку или напылять этот порошок, создавая слой (пленку) из сверхпроводящего материала, который вместе с основой помещается в жидкий азот. Будем надеяться, что в скором времени появятся достаточно дешевые сверхпрово дящие электромагниты, с применением которых повысится эффективность электродинамической системы МП, будут созданы новые тяговые двигатели как для колесного, так и бесконтактного транспорта, а также построены линии электропередачи с малыми потерями.
В современных разработках магнитопланов на электрической СИСТеме МП воздушный зазор составляет 100 - 250 мм, что приблизительно в 10 раз больше, чем зазор
других систем МП, т. е. фактор является основным преимуществом этой системы МП, что особенно важно при высоких скоростях. Затраты на строительство и экссплуатацию путевых устройств такой системы снижаются.
К недостаткам электродинамической системы МП следуетт отнести необходимость применения криогенного оборудования и сверхпроводящих материалов, что значительно удорожает стоимость подвижного состава. При низких скоростях (до 80 км/ч) подъемная сила недостаточна для подвешивания подвижного состава. Поэтому для разгона и "приземления" на последнем устанавливают колеса (рис. 24), т. е. вагон разгоняется до скорости, при которой образуется достаточное подъемное усилие, и отрывается от путевой поверхности (напрашивается аналогия с самолетом). В электродинамической системе МП (особенно при низких скоростях) велико магнитное сопротивление движению, вызванное тормозной силой. Поэтому эту систему МП предполагают использовать при скоростях выше 350 км/ч, т. е. междугородного пассажирского сообщения.
Система тягового привода. Первоначально для передвижения бесконтактных поездов, особенно на ВП, предлагали использовать реактивные, турбореактивные или винтовые двигатели. Однако из-за экологических соображений (шума, загазованности выпускными газами) отказались. Кроме того, эти двигатели имеют невысокий к. п. д. Для поездов на МП, где подвешивание вагонов осуществляют силы, создаваемые электромагнитными полями, желательно заставить работать эти поля и для обеспечения движения поезда. Вспомним о линейном асинхронном электродвигателе, который предлагали использовать на транспорте еще в конце XIX в. В этом двигателе не нужно механическую энергию вращения преобразовывать в поступательную, необходимую для перемещения поезда и создания силы тяги, как это происходит в обычном тяговом электроприводе. Здесь электрическая энергия непосредственно преобразуется в механическую, которая двигает подвижной состав.
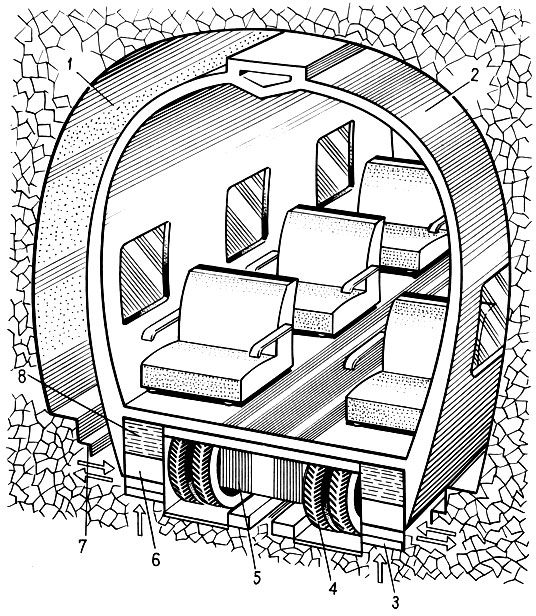
Рис. 24. Проект магнитоплана с электродинамической системой МП, двигающегося в тоннеле: 1 - тоннель; 2 - вагон; 3 - путевой алюминиевый рельс для создания подъемных усилий; 4 - колеса для 'взлета' и 'посадки' магнитоплана; 5 - линейный двигатель с обмотками на вагоне; 6 - сверхпроводящий магнит магнитоплана для его подвески и направления; 7 - путевой алюминиевый рельс для направления; 8 - жидкий гелий
Линейные электродвигатели для скоростного транспорта (как и вращающиеся) могут быть асинхронные (ЛАД) или синхронные (ЛСД).
Принцип работы линейного электродвигателя основан на тех же законах физики, что и обычных трехфазных двигателей переменного тока. Если взять обычный асинхронный двигатель (рис. 25, а) с короткозамкнутым ротором, разрезать его вдоль оси вращения и развернуть в плоскость, как показано на рис. 25, б, то получится ЛАД. При подключении трехфазной обмотки статора (первичной части) такого двигателя к источнику трехфазного переменного тока создается бегущее магнитное поле (а не вращающееся, как у обычных электродвигателей). Это поле наводит во вторичной части (по аналогии в роторе) вихревые токи. При взаимодействии магнитного поля с этими токами и создается сила, увлекающая вторичную часть ЛАД вслед за бегущим магнитным полем. Вторичная часть ЛАД представляет собой немагнитную токопроводящую (алюминиевую или медную, рис. 25, в, г) или реактивную шину (из стали, железа) или комбинированную (типа "сэндвич"), состоящую из алюминиевой полосы и для увеличения магнитной проводимости подкладки из железа (см. рис. 25, г).
По конструкции ЛАД выполняют с двусторонним (см. рис. 25, в) и односторонним (см. рис. 25, г) статорами. Последняя конструкция допускает больший зазор между первичной и вторичной частями двигателя. Однако при одинаковых силе тяги и энергетических показателях масса одностороннего ЛАД примерно на 20% больше, чем масса двустороннего.
Недостаток ЛАД - малый воздушный зазор, который значительно увеличивает технические трудности по созданию полотна дороги и системы МП и направления. Кроме того, даже незначительный зазор ухудшает энергетические показатели ЛАД: к. п. д. и коэффициент мощности его неудовлетворительны, масса и габаритные размеры велики. Если вторичную часть ЛАД расположить на подвижном составе и выполнить в виде фазной обмотки, то при использовании малогабаритных конденсаторов большой электрической емкости показатели его работы могут быть значительно улучшены.
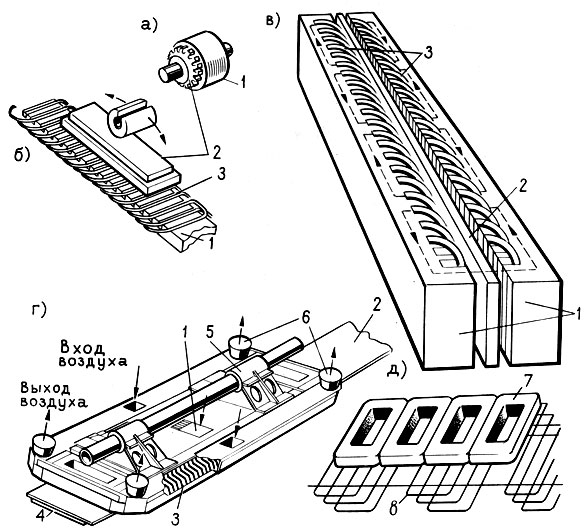
Рис. 25. Линейные тяговые электродвигатели: а - обычный асинхронный электродвигатель с короткозамкнутым ротором; б - развертка этого двигателя; в - двусторонний ЛАД; г - односторонний ЛАД типа ОЛАД-2000; д - синхронный линейный тяговый электродвигатель (ЛСД); 1 - станина (железный сердечник) двигателя; 2 - ротор (вторичная часть) двигателя из немагнитного материала (алюминий, медь); 3 - статорная обмотка; 4 - ферромагнитная подкладка; 5 - место крепления ЛАД к вагону; 6 - вентиляционные патрубки; 7 - сверхпроводящая обмотка возбуждения ЛСД на вагоне; 8 - статорные обмотки ЛСД в путевом полотне
Если первичная часть (статор) линейного тягового двигателя установлена на подвижном составе, то вторичная часть (шина-ротор) - в путевом полотне (рис. см. 25, в, г), но встречаются случаи, когда статор расположен на подвижном составе, и вторичная часть - в путевом полотне. В последнем случае снимается проблема передачи электроэнергии на борт магнитоплана для его передвижения. Так как статор двигателя находится в путевом полотне, то электроэнергию подводят непосредственно к его обмоткам. Значительно уменьшается и масса подвижного состава ввиду того, что наиболее тяжелая часть линейного тягового двигателя, а также преобразователь энергии для его питания сняты с вагона и установлены в пути. Однако при этом растет стоимость последнего, так как на нем по всей длине уложены медные обмотки двигателя.
В линейном синхронном двигателе обычно статорные обмотки размещают в путевом полотне, а вторичную часть (обмотку возбуждения) - на подвижном составе. Как в ЛАД, статорные обмотки создают здесь бегущее магнитное поле. В результате взаимодействия этого поля с магнитным полем обмотки возбуждения, питаемой постоянным током, образуется тяговое усилие, причем скорость магнитоплана с ЛСД равна скорости первичного поля.
В настоящее время применяют два типа односторонних ЛСД: обмотка возбуждения выполнена в виде сверхпроводящих электромагнитов, а обмотка статора - в виде алюминиевых или медных контуров, не имеющих железного сердечника (рис. 25, д); обмоткой возбуждения являются обычные электромагниты постоянного тока, а статор выполнен из медных или алюминиевых проводников с железным сердечником для концентрации магнитного потока (см. рис. 20).
Достоинства ЛСД - большие воздушные зазоры, чем у ЛАД, относительно высокие энергетические показатели и более простая система электроснабжения.
К недостаткам ЛСД со сверхпроводящими обмотками можно отнести: сложность изготовления и высокую стоимость двигателя вследствие использования сверхпроводящих магнитов, трудность управления подвижным составом, необходимость защиты пассажиров от воздействия сильного магнитного поля. В предлагаемых конструкциях магнитопланов обычно используют одни и те же сверхпроводящие обмотки как для создания усилий тяги, так и подвешивания (рис. 26) или направления (см. рис. 24).
Разновидностью ЛСД с однополярной обмоткой возбуждения постоянного тока является линейный индукторный двигатель (ЛИД). В этом двигателе обмотки статора и возбуждения специальной конструкции расположены на подвижном составе. Вторичная часть двигателя неподвижно закреплена в путевом полотне и состоит из железных шихтованных пакетов, расположенных вертикально. Пакеты установлены один от другого на определенном расстоянии. В ЛИД удачно сочетаются высокие энергетические качества синхронного двигателя с относительно простой и дешевой электротехнической частью конструкции путевого полотна. Этот тип двигателя может быть применен в комбинированных системах как для тяги, так для подвешивания и направления в электромагнитной системе МП. Однако вопросы пуска, устойчивости, управления ЛИД и т. д. еще недостаточно разработаны. Также еще недостаточно исследованы возможности и конструктивные решения для линейных тяговых двигателей постоянного тока.
Для регулирования скорости и силы тяги магнитоплана изменяют частоту и напряжение тока, питающего статорные обмотки линейных асинхронных и синхронных двигателей. Для этого в тяговом электроприводе используют управляемые статические преобразователи частоты, устанавливаемые или на вагоне, или в путевом полотне. Эти преобразователи выполняют на базе мощных электронных полупроводниковых приборов - тиристоров, транзисторов и диодов. Чем совершеннее технология изготовления этих полупроводников, тем надежнее работа, меньше масса и габаритные размеры преобразователя, что особенно важно при его установке на подвижном составе.
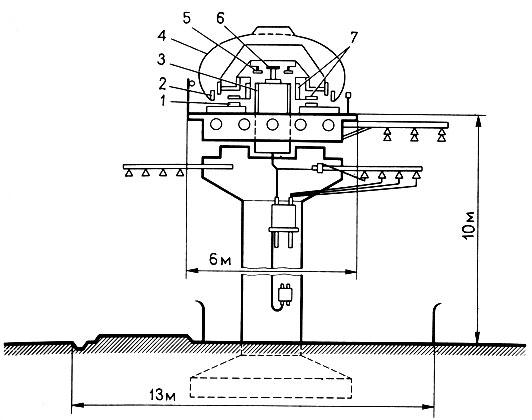
Рис. 26. Схема опытного вагона ML-500 (Япония): 1 - путевые обмотки для создания подвешивания и движения вагона; 2 - колесо для 'взлета' и 'посадки'; 3 - алюминиевые путевые контуры для направления вагона; 4 - кузов вагона; 5 - вспомогательное направляющее колесо; 6 - вспомогательный направляющий рельс; - сверхпроводящие магниты
Если первичная часть тягового двигателя расположена на подвижном составе, то для передвижения состава в нее необходимо передавать большое количество электроэнергии. При существующих в настоящее время скоростях на наземном электрифицированном транспорте передача электроэнергии происходит контактным путем из внешней электросети. По проводам контактной сети (или контактному рельсу) скользят токоприемники железнодорожных электровозов и электропоездов, трамваев, троллейбусов и вагонов метро. Специалисты считают, что до скоростей 200 - 250 км/ч может быть осуществлена надежная передача энергии контактным способом без особой переделки контактной сети и токоприемников. Однако при скоростях 300-400 км/ч передача электроэнергии магнитоплану является сложной технической проблемой.
Известны бесконтактные способы передачи электроэнергии, например индуктивная передача. Здесь энергия из тяговой сети благодаря магнитной индукции между этой сетью и бесконтактным приемником передается на подвижной состав. Подобная система построена в СССР и работает на одной из шахт Донбасса. Однако большие потери электроэнергии, технические сложности в реализации этой системы свидетельствуют о том, что такая система не сможет обеспечить качественную передачу энергии магнитопланам при больших скоростях. К такому же выводу приходят специалисты, рассматривая бесконтактную электроемкостную систему передачи энергии, когда одна обкладка конденсатора является элементом неподвижной тяговой сети, а другая обкладка - токоприемником вагона. В СССР и за рубежом исследуют возможность передачи электроэнергии на движущийся вагон посредством электрической дуги (плазмы), возникающей между токоприемником и контактной шиной, которые не касаются один другого. Однако здесь возникают трудности, например, в создании дугостойких контактных материалов, экологические соображения и т. д. Таким образом, проблема надежной передачи электроэнергии на борт магнитоплана при скоростях 300-400 км/ч и выше требует своего решения.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://motorzlib.ru/ 'Автомобилестроение, наземный транспорт и организация движения'