Канал связи
Систему, предназначенную для передачи информации, называют каналом связи. Канал состоит из следующих элементов: источника сообщения, кодирующего устройства, линии передачи, декодирующего устройства и потребителя информации. Чтобы пояснить назначение этих элементов, рассмотрим передачу информации по каналу акустической диагностики. Здесь источником информации о состоянии механизма служат упругие колебания, возбуждаемые соударением деталей, соединенных в кинематические пары. Они воспринимаются датчиком, установленным на корпусе механизма, и расшифровываются диагностическим прибором.
Источником сообщения в канале акустической диагностики является кинематическая пара, т. е. соединение двух деталей, которые могут перемещаться одна относительно другой. Кинематическими парами служат подшипники качения и скольжения, шестеренчатая пара, сочленения: поршень - гильза, клапан - головка блока, игла форсунки - корпус распылителя и т. д.
Сообщение, которое передает кинематическая пара,- это информация о ее состоянии: о величине зазора, погрешностях шестеренчатого зацепления, запаздывании или опережении открытия и закрытия клапана, о начале и продолжительности впрыска топлива в цилиндр двигателя и о других показателях. Чтобы сообщение поступило к получателю, оно должно быть превращено в сигнал. Эта операция называется кодированием и заключается в том, что определенные параметры процесса, выбранного для передачи сообщения, изменяются в зависимости от содержания передаваемой информации.
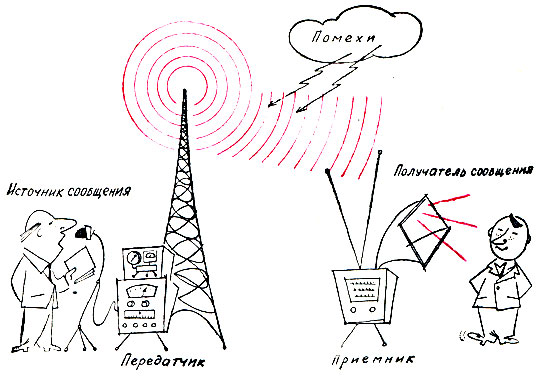
Рис. 13. Канал связи
В акустической диагностике кодирование сообщения о состоянии кинематической пары выполняется в несколько этапов.
Вначале сигнал формируется в виде последовательности импульсов соударения деталей. Информация о состоянии кинематической пары находит отображение в амплитуде и в их положении относительно опорного сигнала. Скажем, чем больше зазор между деталями, тем интенсивнее их столкновение. Разрегулировка механизма приводит к тому, что удар деталей происходит или позже или раньше запроектированного момента времени.
Импульсы соударения деталей возбуждают в механизме упругие колебания. Это второй этап кодирования. Информация о состоянии кинематической пары отражается в параметрах колебания. Датчик, установленный на корпусе механизма, преобразует механические колебания в электрический сигнал. Затем сигнал поступает в блоки диагностической аппаратуры, где подвергается многостадийной процедуре расшифровки (декодирования). Ее результат выдается потребителю в виде заключения о состоянии машины.
Здесь следует сказать несколько слов о кодировании сигнала в самой диагностической аппаратуре. Как мы уже упоминали, расшифровка сигнала представляет собой последовательность его преобразований. Очевидно, что при каждом преобразовании в сигнал могут быть внесены погрешности, которые исказят содержащуюся в нем информацию. Поэтому целесообразно придать ему такую форму, чтобы возможность искажений была минимальной. При следовании сигнала по материалу механизма от пославшей его кинематической пары до датчика возможности преднамеренно влиять на сигнал крайне ограниченны, поскольку он является естественным процессом, связанным с работой механизма.
Иное дело сигнал, проходящий по блокам диагностической аппаратуры. Эти блоки специально разрабатываются для манипуляции с сигналами, поэтому при их проектировании можно предусмотреть возможность работы с сигналами любой формы.
Установлено, что с точки зрения помехоустойчивости большими преимуществами обладают сигналы, представленные в виде импульсной модуляции. Это существенно дискретные сигналы, в отличие от непрерывных, поступающих в диагностическую аппаратуру с датчиков. Поэтому возникает вопрос, как превратить с наименьшими погрешностями непрерывный сигнал в последовательность импульсов. Такая процедура называется квантованием. В результате непрерывный сигнал заменяется последовательностью L его мгновенных значений в определенных точках. В свою очередь, величину непрерывного сигнала в точках отсчета можно представить несколькими способами. Во-первых, можно сделать так, что амплитуда импульсов будет равна значению сигнала в момент появления импульса. Такая система кодирования непрерывного сигнала называется амплитудно-импульсной модуляцией (АИМ). Она широко используется в системах диагностики. Вторая система кодирования заключается в том, что вели-чина сигнала в точке квантования заменяется пачкой пери-одических импульсов, причем чем больше значение сигнала, тем больше импульсов в пачке. Такое кодирование применяется в диагностике перед измерением амплитуды сигнала. Вместо того чтобы измерять эту амплитуду, дело сводится к счету импульсов. Очевидно, что при счете возможность ошибки меньше, чем при обыкновенном измерении.
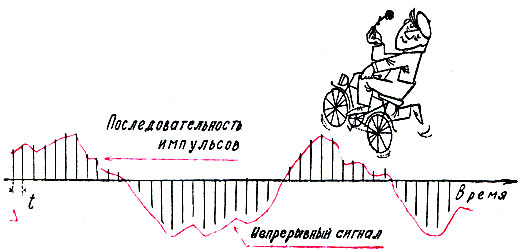
Рис. 14. Квантование непрерывного сигнала. Δt - шаг квантования
И, наконец, последняя система кодирования - это кодово-импульсная модуляция (КИМ). Она состоит в том, что величина сигнала в точке отсчета заменяется комбинацией импульсов, т. е. условным обозначением величины сигнала. Кодовые комбинации импульсов представляют собой числа, записанные в двоичной системе.
В повседневной жизни мы пользуемся десятичными числами. Каждое число представляет собой сумму:

Например,

В двоичной системе числа имеют вид:

Например, число 5 в двоичной системе записывается так:
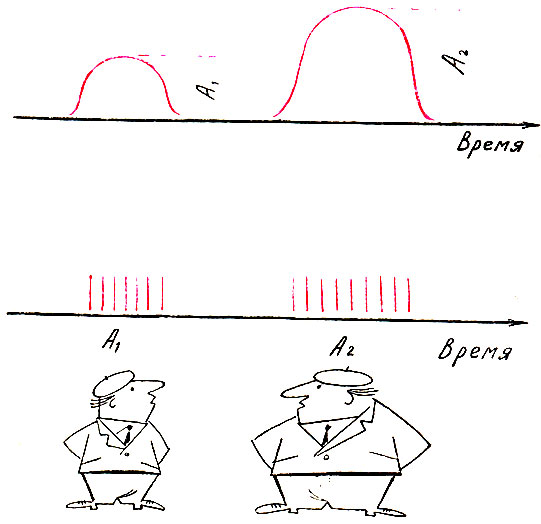
Рис. 15. Величина амплитуды сигнала представляется определенным числом импульсов. Чем больше амплитуда, тем больше импульсов в пачке
С числами, представленными в двоичной системе, сейчас работают почти все вычислительные машины. Это связано с тем, что каждый разряд числа может быть представлен системой, имеющей всего два устойчивых состояния, например двухпозиционным переключателем (тумблером): 1 - тумблер включен, 0 - тумблер выключен. Такие числа очень удобно представлять и импульсами: 1 - есть импульс; 0 - импульса нет. Очевидно, что пропустить импульс или наоборот, обнаружить там, где его нет,- это менее вероятная оплошность, чем просто погрешность в измерении амплитуды сигнала.
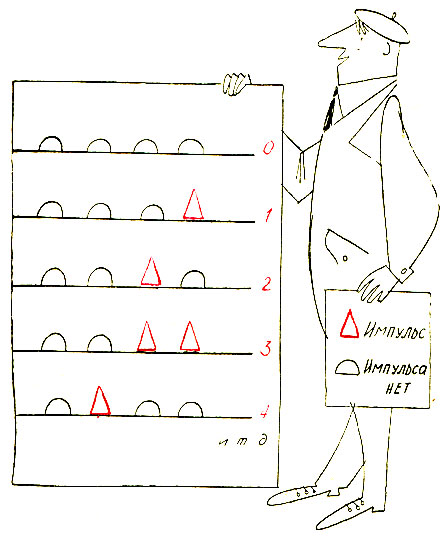
Рис. 16. При кодово-импульсной модуляции числа представляются комбинациями импульсов
В системах диагностики кодово-импульсная модуляция применяется главным образом в двух случаях: при выдаче результатов диагноза на автоматическое печатающее устройство и при использовании в системе диагностики электронной вычислительной машины. С одной из таких систем мы познакомимся ниже.
Для преобразования непрерывного сигнала в цифровой код применяются так называемые аналого-цифровые преобразователи (АЦП) во многих модификациях.
При квантовании непрерывного сигнала большое значение имеет правильный выбор величины интервалов, через которые производятся отсчеты сигнала. Очевидно, чем быстрее протекает процесс, тем чаще следует брать отсчеты, чтобы ошибка была меньше. И наоборот, если процесс изменяется медленно, то отсчеты можно брать реже. Существует теорема, доказанная академиком В. А. Котельниковым, которая утверждает, что практически каждый непрерывный сигнал может быть заменен с любой наперед заданной точностью, последовательностью импульсов. Эта же теорема указывает, как следует подходить к выбору шага квантования.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://motorzlib.ru/ 'Автомобилестроение, наземный транспорт и организация движения'