"Паразитные" степени свободы механизма
Износ и разрушение деталей всегда уменьшают упорядоченность, заложенную в механизм конструктором. Помимо запроектированных движений, детали начинают совершать большое число непредусмотренных. Вал, закрепленный в подшипниках с зазором, помимо собственного вращения, еще и прецессирует (блуждает). Погрешности зацепления нарушают равномерное вращение шестерен, у них появляется колебательная составляющая скорости поворота.
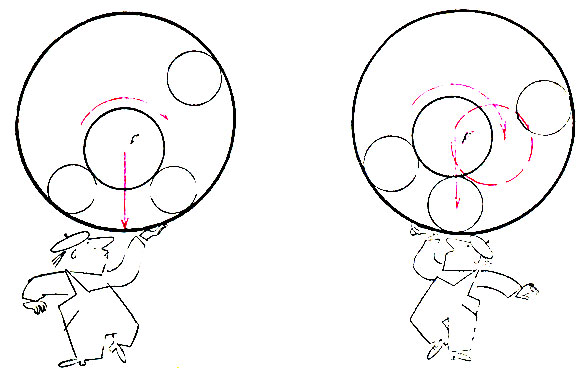
Рис. 23. Движение вала в подшипнике качения
Дефекты деталей и кинематических пар создают в механизме дополнительные степени свободы. Их называют "паразитными". Движение деталей по "паразитным" степеням свободы носит колебательный характер. Но это несколько необычные колебания. Каждый их период распадается на два этапа, соответствующих медленным и быстрым изменениям положения детали. Например, поршень при движении в цилиндре двигателя на всем протяжении своего пути прижат к одной стороне цилиндра. Только достигнув верхней или нижней мертвой точки, он резко перемещается в горизонтальном направлении к противоположной стороне цилиндра. Это происходит из-за мгновенной смены направления горизонтальной составляющей реакции шатуна. Подобные колебания называются релаксационными, или разрывными, и они характерны для движения деталей по "паразитным" степеням свободы.
Чтобы лучше понять механизм релаксационных колебаний, рассмотрим движение вала в подшипнике качения с зазором. На рисунке 23 изображены два характерных положения вала, которые он занимает во время вращения: самое низкое (слева) и самое высокое (справа). В первом случае вал опирается на два шарика, поэтому его положение устойчиво. Вращаясь, вал вращает шарики и въезжает на них, как на колесах, вверх по беговой дорожке наружного кольца подшипника. На подъем вала требуется затратить энергию. Она поступает от источника, вращающего вал.
Подъем происходит сравнительно медленно и продолжается до тех пор, пока центр одного из шариков не пересечет линии действия радиальной силы (правый рисунок). В этот момент положение вала, опирающегося на одну точку, становится неустойчивым, и он самопроизвольно опрокидывается. Накопленная валом во время подъема потенциальная энергия переходит в кинетическую энергию его падения. Высота падения вала, а значит, и сила его удара зависят от величины радиального зазора. Частота ударов равна частоте пересечения шариками линии действия радиальной силы. Она зависит от размеров элементов подшипника, числа шариков и скорости вращения вала. От состояния подшипника частота ударов не зависит, поэтому она может служить признаком для опознания кинематической пары, возбудившей колебания в механизме. Процесс падения заканчивается ударом о следующий шарик. Кинетическая энергия удара расходуется на разрушение подшипника, его нагрев и на возбуждение в механизме упругих волн.
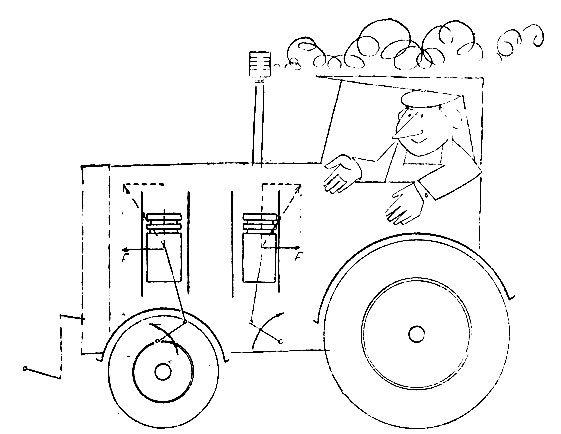
Рис. 24. Когда поршень двигателя проходит верхнюю (нижнюю) мертвую точку, составляющая F реакции шатуна меняет направление, в результате происходит перекладка поршня, сопровождающаяся ударом его о гильзу
Релаксационные колебания, как и любые другие, характеризуются периодом, амплитудой (размахом) и начальной фазой. Период движения детали по "паразитной" степени свободы зависит от конструкции кинематической пары и скоростного режима механизма. Так, период опрокидывания вала равен времени между двумя очередными пересечениями линии действия радиальной силы центром шарика. Это время определяется радиусом шариков а, их количеством N в подшипнике, радиусом внутреннего кольца R и скоростью вращения вала n:
Для других кинематических пар период движения детали по "паразитной" степени свободы, а значит, и период ударов будут другими. Они будут разными и у подшипников, сидящих на валах, вращающихся с различной скоростью.
Мы установили один из признаков, которым отличаются соударения деталей в разных кинематических парах,- это период следования ударов. Второй признак удобно рассмотреть на примере перекладки поршня. Это событие всегда начинается в верхней и нижней мертвых точках, когда шатун находится в вертикальном положении и его реакция на поршень меняет направление. У других кинематических пар двигателя (подшипники, клапаны, распылитель форсунки и т. д.) соударение деталей приходится на другие моменты времени. Таким образом, удары в кинематических парах различаются моментами, в которые происходят эти события.
Теперь рассмотрим, к каким эффектам приводит изменение состояния кинематической пары. Приступая к изучению сложных явлений, полезно начать с простых вещей, которые могут быть осмыслены до конца. Теория механизмов, в которой изучаются идеальные системы (обычно с одной степенью свободы), является довольно трудной для изучения научной дисциплиной. Теория реальных устройств неизмеримо трудней, поэтому ее пока не существует. Разрабатываются только отдельные фрагменты такой теории, освещающие те или иные частные явления, происходящие в механизмах, структура которых имеет отклонения от идеального образца. Но развитие методов акустической диагностики связано прежде всего с пониманием динамики движения "неидеального" механизма, с изучением процесса соударения деталей, с раскрытием закономерностей возбуждения и распространения в механизме упругих волн.
Для изучения реальных явлений обычно конструируют их упрощенные модели. Это общий методический прием науки. Объектом изучения сейчас является для нас движение детали по "паразитной" степени свободы после потери ею равновесия (падение вала в подшипнике, перекладка поршня и т. д.). Примем следующие допущения: сила F, действующая на деталь в это время, постоянна, трение отсутствует.
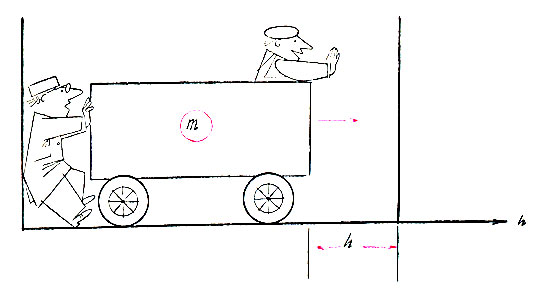
Рис. 25. В момент потери равновесия деталь массой m перемещается под действием силы F по 'паразитной' степени свободы до столкновения с другой деталью. Скорость столкновения и время на прохождение зазора зависят от состояния кинематической пары
Работа силы F, затраченная на перемещение детали по "паразитной" степени свободы, равна произведению силы на путь Fh. Она расходуется на увеличение кинетической энергии детали. В момент соударения деталей кинетическая энергия равна работе силы
Отсюда скорость удара равна
Мы видим, что чем больше сила, действующая на деталь, и чем больше перемещение деталей, тем больше скорость соударения. Ниже будет показано, что амплитуда акустического сигнала пропорциональна скорости соударения деталей, поэтому амплитуда сигнала зависит от тех же переменных, что и скорость соударения.
Величина силы F, приводящей деталь в движение, зависит от скоростного и нагрузочного режимов механизма, которые во время диагностирования имеют определенное значение. Более существенна для нас зависимость скорости соударения деталей v0, а значит, и амплитуды сигнала от величины перемещения детали по "паразитной" степени свободы. Это перемещение определяется состоянием кинематической пары. Для сочленения "поршень - гильза" оно равно зазору. В других случаях при перемещении детали зазор полностью не выбирается, но всегда перемещение зависит от его величины. Так, в случае подшипника качения перемещение вала h по направлению действия радиальной силы F и радиальный зазор подшипника h0 связаны соотношением
где R - радиус внутреннего кольца подшипника;
a - радиус шарика;
N - число шариков в подшипнике.
Подставляя это выражение в формулу для v0, найдем:

т. е. скорость удара в подшипнике, а значит, и амплитуда сигнала пропорциональны радиальному зазору.
Второй эффект, к которому приводит изменение зазора, проявляется в запаздывании удара. Время, которое требуется детали на прохождение "паразитной" степени свободы, равно:
Поэтому, измерив запаздывание удара, можно оценить состояние кинематической пары. Скажем, при зазоре между поршнем и гильзой, равном 0,5 мм, коленчатый вал двигателя ДТ-54 успевает повернуться на 12° от верхней мертвой точки и на 34° от нижней мертвой точки, прежде чем произойдет удар поршня о гильзу.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://motorzlib.ru/ 'Автомобилестроение, наземный транспорт и организация движения'