Полосовой фильтр
Электрический сигнал на выходе датчика имеет малую величину, и прежде чем подать его в анализирующее устройство, сигнал усиливают. Пьезодатчик требует использования двух усилителей: предусилителя и основного усилителя. Предусилитель устанавливают непосредственно вблизи датчика так, чтобы соединяющий их кабель имел как можно меньшую длину. Это связано с тем, что пьезодатчик работает в электрической схеме как конденсатор. Поэтому для расширения частотного диапазона необходимо, чтобы входное сопротивление усилителя имело как можно большую величину. Оно обычно измеряется миллионами ом. Если пьезодатчик будет соединен с усилителем длинным кабелем, то при большом входном сопротивлении усилителя кабель начнет шунтовать его вход для высокочастотных составляющих сигнала. Длинный кабель обладает большой емкостью и, как всякий конденсатор, является хорошим проводником для высокочастотных колебаний.
После прохождения предусилителя сигнал может передаваться на большие расстояния, поэтому диагностическую аппаратуру не обязательно располагать вблизи обследуемого механизма.
Чтобы усилить сигнал и в то же время не исказить его форму, усилитель должен обладать равномерной частотной характеристикой, т. е. он должен усиливать все частотные составляющие сигнала в одинаковое число раз. Этому требованию, например, должен удовлетворять предусилитель. Акустические сигналы механизмов занимают довольно широкий диапазон частот, примерно от 1 тысячи герц до 10-15 тысяч герц. В такой полосе должна быть равномерной частотная характеристика предусилителя.
Требования к основному усилителю несколько иные. Мы знаем, что сигнал, генерируемый каждой кинематической парой, имеет свой спектр. Наибольшая интенсивность колебаний, возбуждаемых разными кинематическими парами, приходится на различные частоты. Поэтому, чтобы увеличить сигнал интересующей кинематической пары и в то же время ослабить сигналы от других пар, усилитель должен иметь большой коэффициент усиления для тех частот, которые соответствуют максимуму спектра полезного сигнала, а все остальные колебания ему пропускать не следует. Усилитель должен выполнять роль полосового фильтра. Чтобы более наглядно показать роль частотной фильтрации в акустической диагностике, расскажем о работе прибора, предназначенного для измерения угла опережения впрыска топлива форсункой дизеля. Несвоевременный впрыск топлива в цилиндр служит частой причиной плохой работы двигателя. В СибИМЭ создан прибор, который позволяет измерять опережение (запаздывание) впрыска. Основным элементом прибора служит полосовой фильтр.
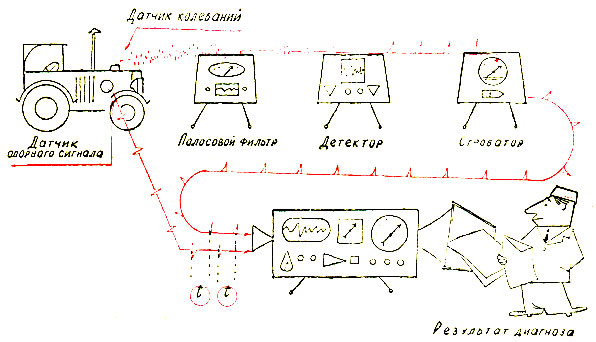
Рис. 82. Блок-схема прибора для измерения угла опережения впрыска топлива форсункой
Прибор имеет два датчика. Один из них устанавливают на колпачке форсунки. Он должен улавливать удары иглы форсунки при ее подъеме в момент впрыска топлива. Второй датчик устанавливают на картер маховика и в момент прохождения мимо него отверстия, которое высверлено в маховике, датчик выдает импульс. Момент времени появления этого импульса соответствует прохождению поршнем первого цилиндра верхней мертвой точки (в. м. т.). Интервал времени между импульсами, вырабатываемыми обоими датчиками, соответствует величине опережения (запаздывания) впрыска топлива форсункой. Прибор его должен измерить. Но дело усложняется тем, что датчик, установленный на колпачке форсунки, улавливает не только удары иглы, но и удары в других кинематических парах двигателя (перекладку поршней, удары в подшипниках и т. д.). Как сделать так, чтобы датчик принимал только удары иглы форсунки и "не слышал" остальных стуков? Эту задачу полностью решает полосовой фильтр.
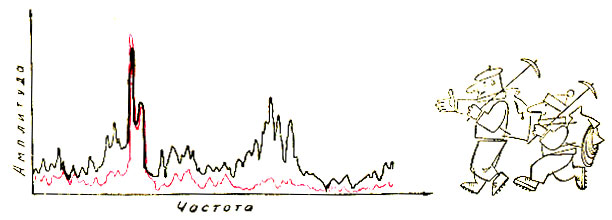
Рис. 33. Два спектра колебаний двигателя
На рисунке изображены два спектра колебаний двигателя. Один из них (красная линия) соответствует сигналу, посылаемому всеми кинематическими парами дизеля, за исключением форсунки. Другой спектр (черная линия) принадлежит сигналу, генерируемому ударами всех деталей двигателя, в том числе и иглой форсунки. Спектры занимают неодинаковый диапазон частот. Первый спектр простирается только до частоты 7 тысяч герц. Кинематические пары двигателя не возбуждают колебаний выше этой частоты. Спектр сигнала форсунки лежит в интервале от нуля до 16 тысяч герц. Таким образом, между 7 и 16 тысячами герц колебания вызываются только ударами иглы форсунки. Если после датчика сигнал пропустить через фильтр, который задержит все колебания, лежащие вне полосы от 7 до 16 тысяч герц, то на выходе фильтра останутся только импульсы ударов иглы. Измерение их поло-Кения теперь не вызывает затруднений.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://motorzlib.ru/ 'Автомобилестроение, наземный транспорт и организация движения'