5. Устройства автоматики, телемеханики и связи
В последнее время на промышленном железнодорожном транспорте более широко применяются (по примеру магистральных дорог) новейшие средства связи и устройства сигнализации, централизации и блокировки, кроме того, разрабатываются и внедряются системы дистанционного управления локомотивами и автоматического управления движением поездов.
В связи с совершенствованием средств связи и появлением .легкой транзисторной аппаратуры особенно широко стала применяться двухсторонняя радиосвязь с погрузочными точками и районами, с транспортными единицами и погрузочно-раз-грузочными механизмами (кранами, автопогрузчиками и др.). Это способствует улучшению использования транспортных средств, повышению времени полезной работы механизмов, устранению порожних пробегов и уменьшению дальности рейсов подвижного состава,
Большое распространение на промышленном транспорте получают различные системы телевидения: передача одного изображения на один экран, передача одного изображения на несколько экранов и прием нескольких изображений на центральном диспетчерском пункте [102]. Для ориентации телевизионной камеры и регулировки объектива применяется дистанционное управление. При необходимости дистанционное управление обеспечивает увеличение изображения объектов. Автоматическая регулировка камер позволяет получать изображение постоянной яркости независимо от изменения условий освещенности транспортных объектов.
На железнодорожном транспорте промышленных предприятий начали применяться различные системы дистанционного перевода стрелок.
На металлургических заводах, открытых горных разработках (на постоянных путях), машиностроительных заводах, так же, как и на магистральных железных дорогах, во многих странах вводится маршрутно-релейная централизация стрелок - наиболее современная система дистанционного управления стрелочными переводами.
В США на медном руднике Utal Copper Mine, где добыча руды ведется открытым способом, протяженность рельсовых путей составляет 273 км. Обогатительная фабрика находится на расстоянии 26 км от рудника [103]. На железнодорожном транспорте рудника применяется ряд технических новшеств, направленных на сокращение транспортных издержек и увеличение производительности труда. Приготовление стрелочных маршрутов осуществляется с одного поста маршрутной централизации, на котором находится всего один оператор. Все электровозы, экскаваторы, диспетчерские посты, пункты техобслуживания и т. д. оборудованы аппаратурой для двухсторонней радиосвязи. Намечается ввести управление стрелками и линейной аппаратурой по радио, внедрить поездографы для автоматического заполнения графиков исполненного движения и др.
Во Франции осуществлена маршрутная централизация стрелок на обогатительной фабрике [104]. На посту централизации, обслуживающем фабрику, один оператор при помощи 126 кнопок обслуживает 145 маршрутов, контролирует и управляет 32 стрелками, из которых 21 оборудовано электрическими приводами. В систему маршрутной централизации входит 16 рельсовых цепей переменного тока, 54 путевых сигнала, 332 реле постоянного тока, 16 км кабеля, 200 км воздушной линии.
В Индии промышленная станция металлургического завода в Роуркела оборудована системой маршрутной централизации одной из фирм ФРГ. В централизованное управление включены 29 путей, 98 стрелок и 94 сигнала.
В СССР электрическая и маршрутная централизация стрелок получает все более широкое применение на крупных промышленных предприятиях, хотя внедрение этих устройств значительно отстает от магистрального железнодорожного транспорта. На Магнитогорском металлургическом комбинате внедрена маршрутно-релейная централизация, в которую включено свыше 300 стрелочных переводов. На Челябинском металлургическом заводе около 70% всех стрелочных переводов включено в систему электрической централизации. Осуществляется внедрение электрической централизации на таких предприятиях, как открытые разработки угля в комбинате «Коркинуголь», где централизованы 36% всех стрелок, Кузнецкий металлургический комбинат - 21,3% четвертый горно-обогатительный комбинат Криворожского бассейна - 79,6% и т. д.
Электрическая централизация стрелок экономически оправдывается только на железнодорожном транспорте крупных промышленных предприятий с интенсивным движением поездов и маневровых составов, на промышленных сортировочных станциях и станциях открытых горных разработок. Вместе с этим обслуживание большого количества стрелочных переводов, имеющихся на подъездных и внутризаводских путях с небольшим объемом работы, вызывает серьезные затраты на содержание стрелочников или задержки в эксплуатационной работе при обслуживании стрелочных переводов составительскими и локомотивными бригадами. В связи с этим во многих зарубежных странах и в СССР ведутся работы по созданию систем для дистанционного перевода стрелок с локомотива.
Дается описание одной из таких систем, испытываемой в ФРГ [105].
На локомотиве под буферным брусом на высоте 200 мм над головкой рельса установлен электромагнит, а на пульте управления имеется кнопка включения его в действие. Возбуждение электромагнита осуществляется от аккумуляторной батареи мощностью 50 вт.
На некотором расстоянии от остряков стрелки, включенной в дистанционное управление, установлены магнитные приемники. таких приемников имеется три - для возможности перевода стрелки с любой стороны следования по прямому пути и с отклонения. Место расположения каждого приемника указано белым щитом с красными ромбами, который установлен на междупутье.
Стрелка оборудована управляющим реле и приводом переменного тока с устройствами для контроля плотности прилегания остряков и для запирания стрелок. Управляющее реле расположено в коробке, установленной на мачте светофора, находящегося возле стрелки и извещающего одним или двумя белыми огнями о том, в какое положение она переведена.
При нажатии на локомотиве кнопки перевода стрелки электромагнит возбуждается и посылает импульс. Этот импульс воспринимается магнитным приемником стрелки и поступает к управляющему реле. Последнее своими контактами замыкает цепь питания стрелочного привода, который и осуществляет перевод стрелки. Во время перевода стрелки, продолжающегося примерно 2 сек, огни светофора погашены. После того как стрелка переведена, специальное защитное устройство снимает напряжение.
Помимо управляющей коробки, на мачте стрелочного светофора установлена служебная коробка,, в которой находится кнопка для возможности перевода стрелки непосредственно с путей.
В СССР разработана и применяется аппаратура радиоуправления с движущегося локомотива одиночными стрелочными переводами или группами стрелок (РУСП-IM). Система может применяться как на передвижных путях карьеров, так и на стационарных путях промышленного транспорта [106]. Аппаратура состоит из командо-передающего устройства пульта управления с шифратором, высокочастотного генератора и блока питания и приемо-исполнительного напольного устройства - приемника, дешифраторной ячейки, блока питания и исполнительных релейных блоков.
техническая характеристика аппаратуры РУСП-IM следующая: максимальная дальность дистанционного управления 400-500 м; частота передатчика 27 120 кгц; ход посылки сигналов двухчастотный с последовательной посылкой частотных импульсов; максимальное число управляемых с одного локомотивного пульта стрелок 15; время срабатывания системы 2,0-2,5 сек.
Командо-передающее устройство размещается на локомотиве, а приемно-испольительное - в непосредственной близости от управляемых стрелочных переводов. Канал связи между пунктами управления и исполнения создается с помощью радиопередающего устройства, работающего на частоте 27, 12 Мгц и радиоприемного устройства, настроенного на ту же частоту.
При испытаниях аппаратуры РУСП-IM на подъездных путях шахт треста «Антрацит» установлено, что она обеспечивает надежное управление стрелочными переводами и светофорами, препятствует переводу стрелок под составом, при повреждении канала радиосвязи позволяет управлять стрелками с помощью щитка местного управления.
Во многих странах (США, ФРГ, Канаде, Франции, Австрии и др.) ведется работа по созданию систем телеуправления маневровыми и промышленными локомотивами. Опыт показал, что применение локомотивов с дистанционным управлением особенно эффективно на горочных промышленных станциях при надвиге составов на горку, на подаче и расстановке вагонов под погрузку и выгрузку, при подаче вагонов на вагоноопрокидыватель, при маневрах на путях перевозки горячих грузов и т. д.
Разрабатываемые и уже созданные опытные системы телеуправления локомотивами основаны на применении двух способов: телеуправления по радиоканалам и телеуправления с использованием пучка проводов воздушной линии связи, идущей вдоль путей.
В США фирма Union Switch and Signal (USSC) разработала систему телеуправления локомотивами по радио при помощи портативных радиопередатчиков [107]. телеуправление локомотивом производится при помощи портативного кнопочного передатчика, который оператор носит на спине. Блок-схема телеуправления локомотивом приводится на рис. 8. Радиосигналы воспринимаются локомотивным приемником, который состоит из антенны, приемника низкой частоты, управляющего реле и управляющих соленоидов локомотива. Расстояние действия радиопередатчиков до 24 км. Число приказов, передаваемых на локомотив, равно 21. В число приказов входят повышение скорости - семь градаций; снижение скорости - семь градаций, включение и отпуск тормозов, звонок, колокол, посыпание песка на рельсы, движение вперед и назад.
Аппаратура управления питается от батареи. Регулятор тормозов, который оператор держит в руке, оснащен кнопками для регулировки скорости и торможения. Вспомогательный блок управления также имеет кнопки для регулировки скорости и торможения. Пальцем руки оператор постоянно нажимает на кнопку безопасности; отпуск ее вызывает остановку локомотива в результате отключения двигателя и включения тормозов.
Указанная система успешно применяется на одном из химических предприятий фирмы Du Pont [108]. Маневровый тепловоз весам 72 т, управляется операторами по радио при помощи радиопередатчика весом 2,3 кг. Протяженность железнодорожных путей предприятия, по которым передвигается тепловоз без машиниста, составляет 24 км. Радиокоманды передаются по ультракоротковолновому диапазону частот.
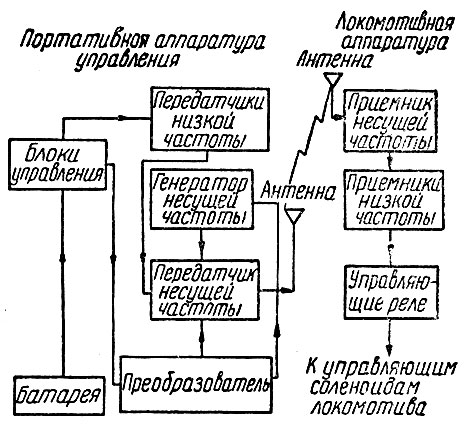
Рис. 8. Блок-схема телеуправления локомотивом по радио
На локомотиве установлены радиоприемный узел и система соответствующих реле. Питание от аккумуляторной батареи.
Второй способ телеуправления локомотивам разработан фирмой USSC для локомотивов типа Plumanth с использованием воздушной линии связи. Приказы на локомотив при этой системе подаются с кнопочного манипулятора по воздушной линии, проходящей параллельно путям. Несущая частота 85 кгц модулируется 12 частотами в диапазоне от 935 до 4805 гц. Осуществляются следующие подачи команд: подача звукового сигнала, применение песка; четыре позиции движения с различными скоростями; переключение на передний и задний ход, два режима торможения.
Генераторы низкой частоты собраны на печатных схемах и транзисторах. Положение кнопок пульта показывает, какая частота вводится в блок предварительного усиления, а затем в блок передатчика несущих частот.
Локомотивное оборудование состоит из антенны приемного блока несущей частоты и аппаратного ящика, в котором находятся 12 приемников низкой частоты и 12 реле. Питание осуществляется от аккумуляторной локомотивной батареи.
Сигнал, принятый антенной, усиливается, демодулируется с подавлением несущей частоты и подается, на соответствующее реле. Все 12 реле управляют при помощи своих контактов определенными соленоидными приборами, которые осуществляют требуемые операции по управлению локомотивом.
Система предусматривает устройства, исключающие последствия неправильных действий. Кроме того, кнопка экстренной остановки позволяет в любой момент включать тормоза для экстренного торможения.
В ФРГ при разработке системы телеуправления принята система передачи сигналов по радиоканалам [109].
Фирма Klockner Humbold Deutz A. G. показала на выставке в Ганновере трехосный тепловоз серии Mg530C с гидравлической передачей, управляемый на расстоянии по радио. Командные импульсы передаются посредством УКВ-установки. тепловоз оснащен восьмицилиндровым двухтактным двигателем мощностью 530 л. с. с водяным охлаждением и предназначен для работы на угольных рудниках; его можно использовать и как маневровый локомотив.
Система радиоуправления на расстоянии работает в многоканальном режиме на звуковой частоте. Кроме позиций «ход», «направление движения», «стоп», «экстренное торможение», эта система может передавать приказы на изменение скорости. Для повышения безопасности движения и лучшего использования частотных каналов радиоприказы кодируются и модулируются по частоте. Каждый приказ представляет собой комбинацию из сигналов трех частот.
Выполненные локомотивом приказы передаются обратно на диспетчерский пункт. В случае нарушений автоматики включается система экстренного торможения. Система управления непосредственно на локомотиве работает бесконтактным способом. Электрические приказы-посылки преобразуются в импульсы давления, которые регулируют количество подаваемого в двигатель топлива, управляют реверсивным механизмом, изменяющим направление движения локомотива, включают воздушную тормозную систему.
При необходимости установку можно дополнить системой ограничения силы тяги локомотива, которая предотвращает боксование и позволяет соразмерять силу тяги с текущей величиной сцепления колес с рельсами.
Во Франции компания CSF применяет ряд систем телеуправления локомотивами, в том числе для станций погрузки угля.
В Австрии фирма Elin-Union поставляет для угольной промышленности Франции промышленные электровозы с телеуправлением, работающие без машиниста [110].
Наиболее эффективной системой автоматизации на промышленном железнодорожном транспорте является автоматическое управление движением поездов.
такие системы разрабатываются и применяются в частности в США, Канаде, ФРГ.
В Канаде компания Iron Ore Со. организовала на полуострове Лабрадор автоматическое управление движением поездов на участке протяженностью 8,8 км для перевозки железной руды в думпкарах из шахтных бункеров рудника на обогатительную фабрику. [111, 112]. Автоматическая система разработана фирмой General Railway Signal Co (США) [113]. Участок имеет непрерывный уклон 2%0 со спуском в сторону фабрики. Каждый поезд, перевозящий руду, состоит из 15 вагонов грузоподъемностью 100 т каждый, которые делают кольцевой рейс на перегоне бункер-фабрика примерно за 80 мин. По участку ежедневно перевозят 55 тыс. т руды, или 17 млн. т в год. Перевозки выполняются одновременно действующими четырьмя поездами с автоматически управляемыми тепловозами мощностью 1750 л. с.
Управление локомотивом каждого поезда производится автоматически при помощи кодового переменного тока. Коды представляют собой переменный ток частотой 60 гц с 37,5 перерывами в 1 мин для передачи приказа о служебном торможении и с 75, 120 и 180 перерывами в 1 мин соответственно для приказов по скоростям 12, 24 и 48 км/ч. Код с 270 перерывами в 1 мин обусловливает движение в обратном направлении, отсутствие кода или его непрерывная подача вызывает экстренное торможение. Малая скорость порядка 200-800 м/ч для точного подвода поезда к месту погрузки или выгрузки регулируется модулированным сигналом тональной частоты 960гц, который подается по проволочному шлейфу, уложенному между рельсами.
Скорость движения состава, находящегося под погрузкой, контролируется оператором станции погрузки в пределах 0,4-0,8 км/ч; подача вагонов под разгрузку осуществляется автоматически с точностью фиксирования положения вагона ± 19 см.
Коды переменного тока и медулированная тональная частота, представляющие собой приказы, подаются непрерывно по рельсам или по проволочному шлейфу навстречу движению поезда. Коды, идущие по рельсам, проверяют также состояние путевых устройств, в том числе целостность рельсового пути, положение стрелок и наличие других поездов.
Поезда воспринимают приказы индуктивно прк помощи приемных устройств. Приказ, принятый поездом, сравнивается с фактической скоростью, устанавливаемой электронным скоростемером. Выходная информация этого устройства преобразуется в действие соответствующих реле, которые автоматически управляют дроссельными заслонками и тормозами, обеспечивая оптимальный режим ведения поезда по участку.
Поезда сформированы так, что локомотив находится в головной части груженого состава при его движении к фабрике и в хвостовой части порожнего состава при его следовании в тоннель шахты, где производится погрузка руды. При наличии локомотива в хвостовой части поезда все приказы, подаваемые с пути, воспринимаются вагоном, который ранее был хвостовым, а теперь стал головным; этот вагон оснащен соответствующими приемными устройствами.
По окончании погрузки грузовой диспетчер нажимает кнопку подачи приказа о следовании поезда со скоростью 48 км/ч в сторону фабрики. Перед этим блокировочной системой проверяется свободность пути следования до разъезда. Груженый поезд занимает главный путь разъезда, а поезд с порож-дими вагонами - его боковой путь. В оптимальных условиях, при которых соблюдаются требуемые скорости, груженый поезд осуществляет на разъезде, находящемся поблизости от пункта погрузки, безостановочное скрещение с порожняковым поездом.
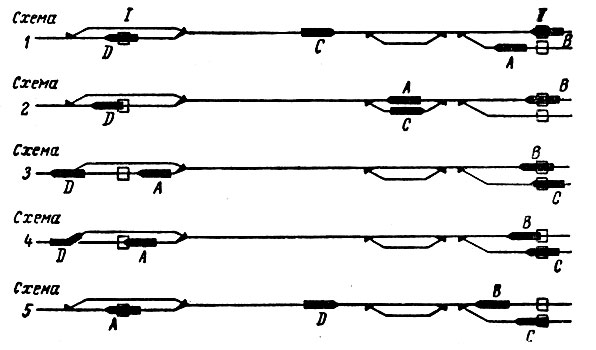
Рис. 9. Блок-схема одновременного действия четырех поездов: I - опрокидыватели; II - конвейеры
1. Груженый поезд А начинает движение в сторону фабрики, поезд В нагружается, поезд D разгружается и порожняковый поезд С следует к месту погрузки (схема 1).
2. Груженый поезд А осуществляет безостановочное скрещение с порожняковым поездом С; поезда В и D проводят соответственно погрузку и разгрузку (схема 2).
3. Груженый поезд А подходит к фабрике, поезд D после разгрузки следует в сторону от фабрики (схема 3).
4. Порожняковый поезд D начинает движение к месту погрузки, поезд А приступает к разгрузке (схема 4).
5. Условия аналогичны условиям, имеющимся в пункте 1, за исключением того, что в данно>м случае на перегон отправляется поезд В, а не А (схема 5).
На рис. 10 приведена путевая схема участка и показаны все коды, которые могут быть поданы в рельсовые цепи. Проанализируем работу участка в соответствии со схемой № 1. Груженый поезд С получает код 180 и следует в северном направлении по однопутному перегону. Грузовой диспетчер отправляет по переведенной стрелке 18 со скоростью 24 км/ч. В дальнейшем при получении кода 75 поезд следует со скоростью 12 км/ч к стрелке 14.
При безостановочном скрещивании поезд северного направления С в процессе следования по перегону и при подходе к переведенной стрелке 14 получает код 120, что обусловливает движение со скоростью 24 км/ч. Если это допускается существующими условиями, то поезд продолжает следование по проверенным стрелкам 16 и 18 до свободного места погрузки. В это время поезд А, идущий по перегону в южном направлении, получает код 180 и следует со скоростью 48 км/ч к дробилке.
На подходе к стрелке 10 поезду подается код 120, его скорость снижается до 24 км/ч. При занятой дробилке поезд получает код 37,5 и останавливается за 425 м перед дробилкой. Если поезд D уже покинул дробилку, то поезд А не останавливается и продолжает следование, в этом случае его остановка происходит у дробилки.
Автоматический подвод поезда к дробилке осуществляется модулированной тональной частотой, подаваемой в шлейфы L1, L2,L3 и L4 и кодом 37,5 рельсовой цепи. При выключенной тональной частоте наличие только кода 37,5 приводит к остановке поезда.
При подходе поезда к месту разгрузки диспетчер дробилки нажимает кнопку, обусловливая этим движение поезда со скоростью 3,2 км/ч и затем в результате торможения его остановку у дробилки с точностью ±20 см. После остановки поезд автоматически блокируется, чтобы предотвратить его перемещение в процессе работы у дробилки.
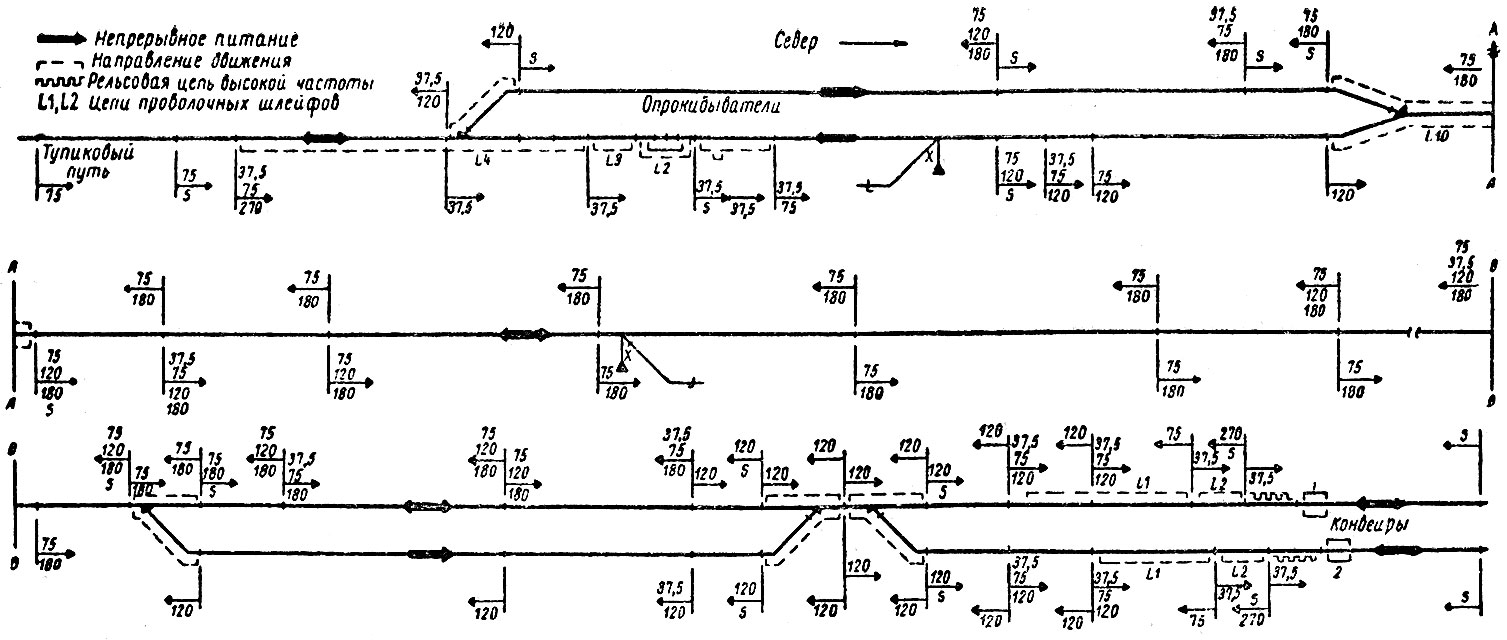
Рис. 10. Путевая схема участка
Рельсовые цепи определяют точное размещение вагонов у дробилки.-После окончания разгрузки всех вагонов поезда D ему подается код 75 и он следует со скоростью 12 км/ч до прохода стрелки 4 последним вагоном. Затем стрелка автоматически переводится в другое положение и поезд получает код 270, который теперь воспринимается хвостовым вагоном, что определяет следование поезда в обратном направлении. Далее в рельсовую цепь поступает код 120 и поезд движется по переведенной стрелке 4 на боковой путь разъезда.
Если путь однопутного перегона не занят, то поезд D получает код 180 и следует по переведенной стрелке 10 и далее па перегону со скоростью 48 км/ч. Поезд С получает код 75 после проследования стрелки 18 в переведенном положении и его скорость снижается до 12 км/ч.
Код 75 и непрерывная тональная частота регулируют установку поезда в тоннеле, по проследовании соответствующего изолирующего стыка поезд останавливается. Используя непрерывную тональную частоту, диспетчер передвигает поезд в процессе погрузки.
По окончании погрузки диспетчер переключает поезд С на автоматическую систему. Поезд В в это время покидает (место погрузки и следует к дробилке.
Поездные устройства для восприятия приказов, передаваемых в форме кодового переменного тока или модулированной тональной частоты, расшифровывают их, после чего осуществляется соответствующее воздействие на силовые и тормозные устройства. Режим движения поезда непрерывно сравнивается с приказами. Несоответствие режима движения с приказом автоматически вызывает корректирующие действия (рис. 11).
Впереди каждой из ведущих колесных осей поезда установлены приемники, при этом их катушки центрированы по отношению к рельсам и размещены на высоте 15 см над их головкой. Локомотивная аппаратура избирания направления обеспечивает включение приемника на локомотиве или на хвостовом вагоне в соответствии с установленным направлением движения.
На локомотиве сигнал избирательного приемника проходит через настроенный контур, которым определяется характер кода, подаваемого кодовой рельсовой цепью или проволочным шлейфом. Локомотивный усилитель усиливает кодовые сигналы, которые после выпрямления преобразуются в импульсы, питающие кодово-чувствительные реле.
На хвостовом вагоне осуществляется восприятие кодовых импульсов, которые усиливаются и выпрямляются в хвостовом вагоне и питают здесь кодово-чувствительное реле. Кодовые сигналы далее передаются по поездному кабелю к локомотивному автоматическому оборудованию, расположенному на штативе.
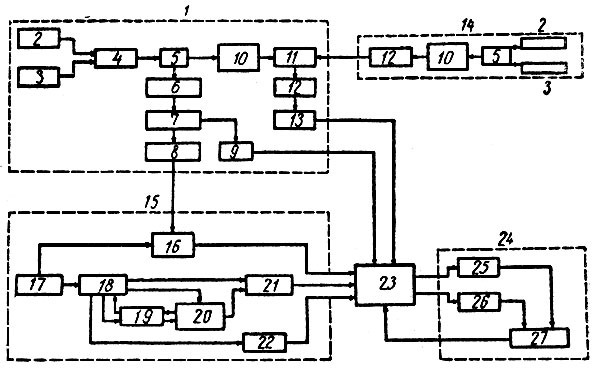
Рис. 11. Схема приемных, воспринимающих и управляющих блоков на локомотиве и хвостовом вагоне: 1 - локомотивные устройства приема приказов; 2 - приемник на конце А; 3 - приемник на конце В; 4 - избирание приемника; 5 - настроенный контур; 6 - усилитель несущей частоты; 7 - тональный усилитель; 8 - дискриминатор малых скоростей; 9 - тональные реле; 10 - усилитель приказов управления поездом; 11 - избирание направления; 12 - реле; 13 - дешифратор и реле; 14 - устройства приема приказов хвостовым вагоном; 15 - показания по скорости поезда; 16 - задание по малой скорости; 17 - осевой генератор; 18 - усилитель по показанию для повышения скорости; 19 - фильтр для показаний скорости; 20 - усилитель по скорости; 21 - микроконтроллер; 22 - указание по направлению; 23 - сравнение приказа и фактической скорости; 24 - управление поездом; 25 - управление дроссельными заслонками; 26 - управление тормозами; 27 - работа поезда
Информация о скорости поезда подается переменным током, частота которого пропорциональна скорости. Этот ток генерируется осевым генератором, установленным на буксе локомотива и приводимым в движение колесной осью. Электронные устройства, связанные с осевым генератором, отмечают отклонения скорости от заданной с градациями +0,8 и +3,2 км/ч; они начинают действовать при скорости поезда, превышающей 1,6 км/ч.
Скорость локомотива регулируется повышением и понижением мощности, создаваемой его машинами. так, например, если необходимо установить скорость 48 км/ч, то мощность локомотива должна соответствовать скорости, не превышающей 48,8 км/ч. Если такая мощность установлена, то поезд при следовании по спуску увеличивает скорость до 51,2 км/ч; при этом возникает служебное торможение, снижающее скорость до 48 км/ч. Аналогичные действия наблюдаются и при дальнейшем следовании поезда.
Регулирование малой скорости в пределах 0,2-0,8 км/ч осуществляется при помощи модулированных сигналов тональной частоты со значительной точностью порядка 16 м/ч.
Поезда оборудованы электропневматическими тормозами, которые используются в процессе челночного движения. При малых скоростях торможение регулируется модулированной тональной частотой 960 гц и осуществляется тормозными колодками.
Система управления поездами предусматривает возможность перехода с автоматического на ручное управление, что необходимо для технического обслуживания локомотивов.
По обеим сторонам каждого локомотива установлены красные кнопки экстренного торможения, которые могут приводиться в действие человеком, находящимся на пути. При нажатии кнопки загорается красная лампа, рядом с которой установлена черная кнопка, позволяющая восстанавливать автоматическое действие поезда.
Вся система управления поездами рассчитана на обеспечение принятого в устройствах СЦБ принципа, заключающегося в приведении этих устройств в заграждающее положение при возникновении повреждений. Любое повреждение в системе передачи приказов и управления автоматическими поездами обусловливает их остановку.
Установленный в помещении фабрики пульт управления совмещен с табло, на котором контролируются местоприбыва-ние поездов и действие всей системы управления ими.
При необходимости систему управления движением можно изменять с передачей основных функций на центральный диспетчерский пульт, расположенный на станции разгрузки.
Во избежание замерзания путевых стрелок в зимнее время строятся защитные навесы от снега длиной 45 м. такой метод оказался эффективнее, чем использование обогревателей. Кроме того, для предупреждения примерзания тормозных колодок к колесам вагонов в тормозных цилиндрах оставляется избыточное давление, препятствующее отходу колодки от колеса и образованию зазоров, в которых обычно появляется влага от таяния снега.
В ФРГ на крупных известковых разработках эксплуатируется кольцевая электрическая железнодорожная линия с полностью автоматизированным управлением [114, 115].
Электронная автоматика для дороги была спроектировала и изготовлена фирмой ВВС. Кольцевая дорога длиной 1400 м разделена на семь блок-участков. Места загрузки связаны с кольцом тупиковыми путями и отжимными стрелками. Разгрузочная станция расположена на кольце рядом с центральным пультом управления.
Обслуживающий персонал имеется только на местах загрузки, разгрузочной станции и центральном пульте. три состава, обслуживающие дорогу, передвигаются без машинистов. Каждый состав сообщает о своем месте расположения сигналами определенной частоты на центральный пульт, где они расшифровываются логическим устройством. Команды центрального пульта о дальнейшем продвижении или остановке состава модулируются на несущую частоту и передаются по проводам.
На каждом блок-участке или тупиковом пути может одновременно находиться только один состав. Место расположения каждого состава показывается на световом табло. По заданной команде автоматически включается программа, согласно которой состав движется по кольцу, переезжает соответствующую стрелку, останавливается, а затем задним ходом заезжает на тупиковый путь до места загрузки.
Груженые составы движутся по тупиковым путям и по кольцу до разгрузочной станции в одном направлении.
Опыт применения на зарубежном транспорте предприятий автоматизированных железных дорог заслуживает изучения не только с точки зрения дальнейшей автоматизации промышленного железнодорожного транспорта, но представляет интерес и для магистральных железных дорог.
В СССР работь по автоматизации управления железнодорожным транспортом промышленных предприятий ведутся в нескольких направлениях. Разработана система дистанционного и телемеханического управления рудничными электровозами Криворожским горнорудным институтом [116]. В цветной металлургии применено дистанционное управление локомотивами на Дегтярном медном руднике. Созданы системы дистанционного управления промышленными электровозами, работающими по системе многих единиц, основанные на принципах применения телемеханических и следящих систем, а также их комбинаций [117].
Большой интерес представляют ведущиеся в ряде научных и проектных институтов разработки, предусматривающие полную автоматизацию управления работой железнодорожного транспорта крупнейших предприятий с применением электронных вычислительных машин. В качестве основы устройств автоматизации принимается маршрутно-релейная система электрической централизации. Предусматривается применение устройства автоматической поездной информации, разработанное Промтрансниипроектом, обеспечивающее автоматический сбор и ввод информации в специализированную-управляющую вычислительную машину. Выбор оптимального режима управления работой транспорта предприятия производится управляющей вычислительной машиной на основе требовании и условий технологии производства и организации работы железнодорожного транспорта.
В настоящее время опытное внедрение подобных систем; автоматизации производится на Магнитогорском металлургическом комбинате [118, 119], заводе Запорожсталь [120]} и на двух крупных открытых горных разработках.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://motorzlib.ru/ 'Автомобилестроение, наземный транспорт и организация движения'