Динамический расчет
Как уже отмечалось выше, рулевое управление с усилителем является элементарной системой автоматического регулирования с жесткой обратной связью. При неблагоприятном сочетании параметров система такого типа может оказаться неустойчивой В данном случае неустойчивость системы выражается в автоколебаниях управляемых колес. Такие колебания наблюдались на некоторых экспериментальных образцах отечественных автомобилей.
Задача динамического расчета - найти условия, при которых автоколебания не могли бы возникнуть, если все необходимые параметры для расчета известны, или выявить, какие параметры следует изменить, чтобы прекратить автоколебания на экспериментальном образце, если они наблюдаются.
Предварительно рассмотрим физическую сущность процесса возникновения колебания управляемых колес. Вновь обратимся к схеме усилителя, представленной на рис. 1. Усилитель может включаться как водителем при приложении усилия к рулевому колесу, так и управляемыми колесами от толчков со стороны дороги.
Как показывают опыты [4, 10], такие колебания могут возникать во время прямолинейного движения автомобиля с большой скоростью, на поворотах при движении с небольшой скоростью, а также при поворотах колес на месте.
Рассмотрим первый случай. При повороте управляемого колеса от толчков со стороны дороги или по другой какой-либо причине корпус распределителя начнет смещаться относительно золотника, и, как только будет устранен зазор Δ1 жидкость начнет поступать в полость A силового цилиндра. Рулевое колесо и сошка рулевого управления считаются при этом неподвижными Давление в полости A станет повышаться и препятствовать продолжению поворота. Из-за эластичности резиновых шлангов гидросистемы и упругости механических связей для заполнения полости A жидкостью (для создания рабочего давления) необходимо определенное время, в течение которого управляемые колеса успеют повернуться на некоторый угол. Под действием давления в полости A колеса начнут поворачиваться в другую сторону до тех пор, пока золотник не займет нейтрального положения. Затем давление понижается. Сила инерции, а также остаточное давление в полости А повернут управляемые колеса от нейтрального положения вправо, и цикл повторится со стороны правой полости.
Этот процесс изображен на рис. 33, а и б.
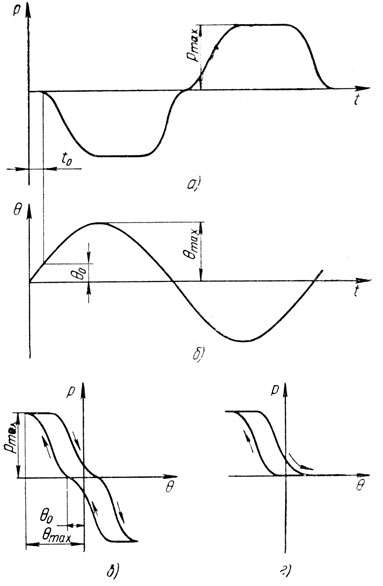
Рис. 33. Процесс возникновения колебании управляемых колес, вызываемых усилителем
Угол θ0 соответствует такому повороту управляемых колес, при котором сила, передаваемая рулевому приводу, достигает величины, необходимой для перемещения золотника.
На рис. 33,в приведена зависимость p = f(θ), построенная по кривым рис. 33,а и б. Поскольку ход штока можно считать линейной функцией угла поворота (ввиду малости угла θmax), график (рис. 33, в) можно рассматривать как индикаторную диаграмму силового цилиндра усилителя. Площадь индикаторной диаграммы определяет работу, затрачиваемую усилителем на раскачивание управляемых колес.
Следует обратить внимание, что описанный процесс может наблюдаться только,если при колебаниях управляемых колес рулевое колесо остается неподвижным. Если рулевое колесо поворачивается, усилитель не включается. Так, например, усилители с приводом распределителей от углового смещения верхней части рулевого вала относительно нижней обычно обладают этим свойством и не вызывают автоколебаний
При повороте управляемых колес на месте или при движении автомобиля с малой скоростью колебания, вызываемые усилителем, по характеру отличаются от рассмотренных Давление во время таких колебаний повышается только в одной полости. Индикаторная диаграмма для этого случая изображена на рис. 33, г.
Такие колебания могут быть объяснены следующим образом. Если в момент, соответствующий повороту колес на некоторый угол θr, задержать рулевое колесо, то управляемые колеса (под действием сил инерции и остаточного давления в силовом цилиндре) будут продолжать двигаться и повернутся на угол θr + θmax. Давление в силовом цилиндре при этом упадет до 0, так как золотник будет находится в положении, соответствующем повороту колес на угол θr. После этого сила упругости шины начнет поворачивать управляемое колесо в обратном направлении. Когда колесо вновь повернется на угол θr, усилитель включится. Давление в системе начнет повышаться не сразу, а спустя некоторое время, за которое управляемое колесо сможет повернуться на угол θr-θmax. Поворот влево в этот момент прекратится, поскольку силовой цилиндр вступит в работу, и цикл повторится сначала.
Обычно работа усилителя, определяемая площадью индикаторных диаграмм, незначительна по сравнению с работой трения в шкворнях, соединениях рулевых тяг и резине, и автоколебания не возможны. Когда площади индикаторных диаграмм велики, а работа, ими определяемая, сравнима с работой трения, незатухающие колебания вероятны. Такой случай исследуется ниже.
Для нахождения условий устойчивости системы наложим на нее ограничения:
- Управляемые колеса имеют одну степень свободы и могут поворачиваться только вокруг шкворней в пределах зазора в распределителе усилителя.
- Рулевое колесо жестко закреплено в нейтральном положении.
- Связь между колесами абсолютно жесткая.
- Масса золотника и деталей, связывающих его с управляющими колесами, пренебрежимо мала.
- Силы трения в системе пропорциональны первым степеням угловых скоростей.
- Жесткости элементов системы постоянны и не зависят от величины соответствующих перемещений или деформаций.
Остальные принятые при анализе допущения оговариваются в процессе изложения.
Ниже исследуются устойчивость рулевых управлений с гидроусилителями, смонтированными по двум возможным вариантам: с длинной обратной связью и короткой.
Структурная и расчетная схемы первого варианта изображены на рис. 34 и 35 сплошными линиями, второго - штриховыми. При первом варианте обратная связь воздействует на распределитель после того, как силовой цилиндр осуществил поворот управляемых колес. При втором варианте корпус распределителя перемещается, выключая усилитель, одновременно со штоком силового цилиндра.
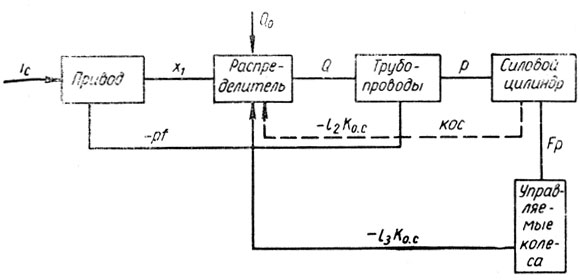
Рис. 34. Структурная схема усилителя (КОС - короткая обратная связь)
Вначале рассмотрим каждый элемент схемы с длинной обратной связью.
Рулевой механизм (на структурной схеме не показан). Поворот рулевого колеса на некоторый небольшой угол а вызывает усилие Tc в продольной тяге
где c1 - приведенная к продольной тяге жесткость рулевого вала и продольной тяги; lc - длина сошки; x1 - перемещение золотника.
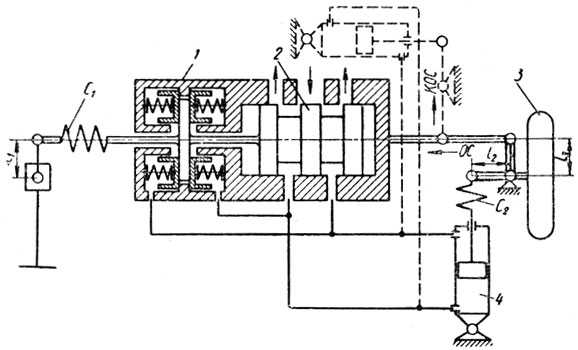
Рис. 35. Расчетная схема усилителя: 1 - привод к распределителю; 2 - распределитель; 3 - управляемые колеса; 4 - силовой цилиндр; ОС - обратная связь, КОС - короткая обратная связь
Привод распределителя. Для привода управления распределителем входной величиной является усилие Tc, выходной - смещение золотника x1. Уравнение привода с учетом обратной связи по углу поворота управляемых колес θ и по давлению в системе p имеет следующий вид при Tc>Tn:
 (27)
(27)где Kо.с - коэффициент усилия обратной связи по углу поворота управляемых колес; cn - жесткость центрирующих пружин.
Распределитель. Колебания, вызываемые усилителем движущегося автомобиля, связаны с поочередным включением то одной, то другой полостей силового цилиндра. Уравнение распределителя в этом случае имеет вид
 (28)
(28)где Q - количество жидкости, поступающей в трубопроводы силового цилиндра; x1-θlзKо.с = Δx - смещение золотника в корпусе.
Функция f(Δx) нелинейна и зависит от конструкции золотника распределителя и производительности насоса. В общем случае при заданных характеристике насоса и конструкции распределителя количество жидкости Q, поступающей в силовой цилиндр, зависит как от хода Δx золотника в корпусе, так и от разности давлений Δp на входе в распределитель и выходе из него.
Распределители усилителей конструируют так, чтобы, с одной стороны, при относительно больших технологических допусках на линейные размеры иметь минимальное давление в системе при нейтральном положении золотника, а с другой - минимальное смещение золотника для приведения усилителя в действие. В результате золотниковый распределитель усилителя по характеристике Q = f(Δx, Δp) близок к клапанному, т. е. величина Q не зависит от давления Δp и является только функцией смещения золотника. С учетом направления действия силового цилиндра она будет выглядеть, как изображено на рис. 36, а. Такая характеристика свойственна релейным звеньям систем автоматического регулирования. Линеаризация этих функций проведена по методу гармонической линеаризации [2]. В результате получаем для первой схемы (рис. 36, а)
 (29)
(29)где Δx0 - смещение золотника в корпусе, при котором начинается резкий рост давления; Q0 - количество жидкости, поступающей в напорную магистраль при перекрытых рабочих щелях; a - максимальный ход золотника в корпусе, определяемый амплитудой колебаний управляемых колес.
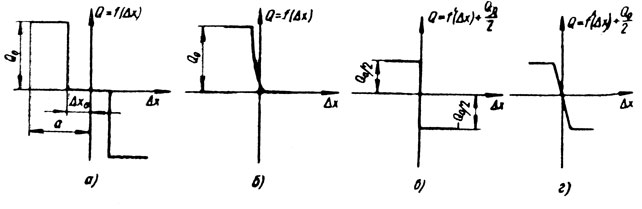
Рис. 36. Идеализированные характеристики распределителей различных типов
Трубопроводы. Давление в системе определяется количеством, поступившей в напорную магистраль жидкости и упругостью магистрали:
 (30)
(30)где x2 - ход поршня силового цилиндра, положительное направление в сторону действия давления; c2 - объемная жесткость гидросистемы; cг = dp/dVг (Vг = объем напорной магистрали гидросистемы).
Силовой цилиндр. В свою очередь, ход штока силового цилиндра определяется углом поворота управляемых колес и деформацией деталей связи силового цилиндра с управляемыми колесами и с точкой опоры
 (31)
(31)где l2 - плечо приложения усилия силового цилиндра относительно осей шкворней колес; c2 - жесткость крепления силового цилиндра, приведенная к ходу штока силового цилиндра.
Управляемые колеса. Уравнение поворота управляемых колес относительно шкворней имеет второй порядок и, вообще говоря, нелинейно. Учитывая, что колебания управляемых колес происходят с относительно малыми амплитудами (до 3-4°), можно принять, что стабилизирующие моменты, вызванные упругостью резины и наклоном шкворней, пропорциональны первой степени угла поворота управляемых колес, а трение в системе зависит от первой степени угловой скорости поворота колес. Уравнение в линеаризованном виде выглядит следующим образом:
 (32)
(32)где J - момент инерции управляемых колес и деталей, жестко с ними связанных относительно осей шкворней; Г - коэффициент, характеризующий потери на трение в рулевом приводе, гидросистеме и в шинах колес; N - коэффициент, характеризующий действие стабилизирующего момента, возникающего вследствие наклонов шкворней и упругости резины шин.
Жесткость рулевого привода в уравнении не учитывается, так как считается, что колебания малы и происходят в интервале углов, при которых корпус золотника перемещается на расстояние, меньшее полного хода или равное ему. Произведение Fl2p определяет величину момента, создаваемого силовым цилиндром относительно шкворня, а произведение fрэlэKо.сp - силу реакции со стороны обратной связи на величину стабилизирующего момента. Влиянием момента, создаваемого центрирующими пружинами, можно пренебречь из-за его малости по сравнению со стабилизирующим.
Таким образом, кроме указанных выше допущений, на систему накладываются следующие ограничения:
- усилия в продольной тяге линейно зависят от поворота вала сошки, трение в шарнирах продольной тяги и в приводе к золотнику отсутствует;
- распределитель является звеном с релейной характеристикой, т. е. до определенного смещения Δx0 золотника в корпусе, жидкость из насоса не поступает в силовой цилиндр;
- давление в напорной магистрали и силовом цилиндре прямо пропорционально избыточному объему жидкости, поступившей в магистраль, т. е. объемная жесткость гидросистемы cг постоянна.
Рассмотренная схема рулевого управления с гидравлическим усилителем описывается системой из семи уравнений (26) - (32).
Исследование устойчивости системы проведено с помощью алгебраического критерия Рауса-Гурвица.
Для этого произведено несколько преобразований. Найдено характеристическое уравнение системы и условие ее устойчивости, которое определяется следующим неравенством:
 (33)
(33)Из неравенства (33) следует, что при a≤Δx0 колебания невозможны, так как отрицательный член неравенства равен 0.
Амплитуда перемещения золотника в корпусе при заданной постоянной амплитуде колебаний управляемых колес θmax находится из следующего соотношения:
 (34)
(34)Если при угле θmax давление p = pmax, то перемещение a зависит от соотношения жесткостей центрирующих пружин и продольной тяги cn/c1, площади реактивных плунжеров fр.э, силы предварительного сжатия центрирующих пружин Tn и коэффициента обратной связи Kос. Чем больше отношение cn/c1 и площадь реактивных элементов, тем более вероятно, что значение a окажется меньше величины Δx0, а автоколебания невозможными.
Однако этот путь устранения автоколебаний не всегда возможен, так как увеличение жесткости центрирующих пружин и размера реактивных элементов, повышая усилия на рулевом колесе, влияют на управляемость автомобиля, а уменьшение жесткости продольной тяги может способствовать возникновению колебаний типа шимми.
В четыре из пяти положительных членов неравенства (33) входит в качестве сомножителя параметр Г, характеризующий трение в рулевом управлении, резине шин и демпфирование вследствие перетеканий жидкости в усилителе. Обычно конструктору сложно варьировать этим параметром. В качестве сомножителей в отрицательный член входят расход жидкости Q0 и коэффициент обратной связи Kо.с. С понижением их значений склонность к автоколебаниям уменьшается. Величина Q0 близка к производительности насоса. Итак, для устранения автоколебаний, вызываемых усилителем во время движения автомобиля, требуется:
- Повышение жесткости центрирующих пружин или увеличение площади реактивных плунжеров, если это возможно по условиям легкости рулевого управления.
- Уменьшение производительности насоса без понижения скорости поворота управляемых колес ниже минимально допустимой.
- Уменьшение коэффициента усиления обратной связи Kо.с, т. е. сокращение хода корпуса золотника (или золотника), вызываемого поворотом управляемых колес.
Если этими способами нельзя устранить автоколебания, то необходимо изменить компоновку рулевого управления или ввести специальный гаситель колебаний (жидкостной или сухого трения демпфер) в систему рулевого управления с усилителем. Рассмотрим другой возможный вариант компоновки усилителя на автомобиле, обладающий меньшей склонностью к возбуждению автоколебаний. Он отличается от предыдущего более короткой обратной связью (см. штриховую линию на рис. 34 и 35).
Уравнения распределителя и привода к нему отличаются от соответствующих уравнений предыдущей схемы.
Уравнение привода к распределителю имеет вид при Tc>Tn:
 (35)
(35)2 уравнение распределителя
 (36)
(36)где iэ - кинематическое передаточное отношение между перемещением золотника распределителя и соответствующим ему перемещением штока силового цилиндра.
Аналогичное исследование новой системы уравнений приводит к следующему условию отсутствия автоколебаний в системе с короткой обратной связью
 (37)
(37)Полученное неравенство отличается от неравенства (33) увеличенным значением положительных членов. В результате все положительные слагаемые больше отрицательных при реальных значениях входящих в них параметров, поэтому система с короткой обратной связью практически всегда устойчива. Трение в системе, характеризуемое параметром Г, может быть уменьшено до нуля, так как четвертый положительный член неравенства не содержит этого параметра.
На рис. 37 представлены кривые зависимости величины трения, необходимого для гашения колебаний в системе (параметр Г) от производительности насоса, рассчитанные по формулам (33) и (37).
Рис. 37. Зависимость величины необходимого демпфирования от производительности насоса усилителей: 1 - с длинной обратной связью, колебания на месте; 2 - с длинной обратной связью, колебания в движении; 3 - с короткой обратной связью, колебания на месте; 4 - с короткой обратной связью, колебания в движении
Зона устойчивости для каждого из усилителей находится между осью ординат и соответствующей кривой. При расчетах амплитуда колебаний золотника в корпусе принималась минимально возможной из условия включения усилителя: a≥Δx0 = 0,05 см.
Остальные параметры, входящие в уравнения (33) и (37), имели следующие значения (что приблизительно соответствует рулевому управлению грузового автомобиля грузоподъемностью 8-12 т): J = 600 кг*см*сек2/рад; N = 40 000 кг*см/рад; Q = 200 см3/сек; F = 40 см2; l2 = 20 см; l3 = 20 см; cг = 2 кГ/см5; c1 = 500 кГ/см; c2 = 500 кГ/см; cn = 100 кГ/см; fр.э = 3 см2.
У усилителя с длинной обратной связью зона неустойчивости лежит в диапазоне реальных значений параметра Г, у усилителя с короткой обратной связью - в диапазоне не-встречающихся значений параметра.
Рассмотрим колебания управляемых колес, возникающие при поворотах на месте. Индикаторная диаграмма силового цилиндра во время таких колебаний показана на рис. 33, г. Зависимость количества поступающей в силовой цилиндр жидкости от перемещения золотника в корпусе распределителя имеет вид, показанный на рис. 36, б. Во время таких колебаний зазор Δx0 в золотнике уже устранен поворотом рулевого колеса и при малейшем смещении золотника вызывает поток жидкости в силовой цилиндр и рост давления в нем.
Линеаризация функции  (см. рис. 36, в) дает уравнение
(см. рис. 36, в) дает уравнение
 (38)
(38)Коэффициент N в уравнении (32) будет определяться в данном случае не действием стабилизирующего момента, а жестокостью шин на скручивание в контакте. Он может быть принят для рассмотренной в качестве примера системы равным N = 400 000 кГ*см/рад.
Условие устойчивости для системы с длинной обратной связью может быть получено из уравнения (33) путем подстановки в него вместо выражения [(4π) (Q0/a)]√[1-(Δx02/a2)] выражения (2Q0/πa).
В результате получим
 (39)
(39)Члены неравенства (39), содержащие параметр a в числителе, уменьшаются с уменьшением амплитуды колебаний и, начиная с каких-то достаточно малых значений a, ими можно пренебречь. Тогда условие устойчивости выражается в более простой форме:
 (40)
(40)При реальных соотношениях параметров неравенство не соблюдается и усилители, скомпонованные по схеме с длинной обратной связью, практически всегда вызывают автоколебания управляемых колес при поворотах на месте с той или иной амплитудой.
Устранить эти колебания без изменения вида обратной связи (и, следовательно, компоновки усилителя) удается в какой-то мере лишь изменением формы характеристики Q = f(Δx), придав ей наклон (см. рис. 36, г), или существенным увеличением демпфирования в системе (параметр Г). Технически для изменения формы характеристики делают специальные скосы на рабочих кромках золотников [10]. Расчет системы на устойчивость с таким распределителем гораздо более сложен, так как допущение о том, что количество жидкости Q, поступающей в силовой цилиндр, зависит только от смещения золотника Δx, уже не может быть принято, ибо рабочий участок перекрытия рабочих щелей растягивается и количество поступающей жидкости Q на этом участке зависит также от перепада давлений в системе до золотника и после него. Метод увеличения демпфирования рассмотрен ниже.
Рассмотрим, что происходит при поворотах на месте, если осуществляется короткая обратная связь. В уравнении (37) выражение [(4π) (Q0/a)]√[1-(Δx02/a2)] следует заменить выражением (2/π)*(Q0/a). В результате получим неравенство
 (41)
(41)Исключив, как и в предыдущем случае, члены, содержащие величину а в числителе, получим
 (42)
(42)В неравенстве (42) отрицательный член примерно на порядок меньше, чем в предыдущем, и поэтому в системе с короткой обратной связью при реально возможных сочетаниях параметров автоколебания не возникают.
Таким образом, для получения заведомо устойчивой системы рулевого управления с гидроусилителем обратная связь должна охватывать только практически безынерционные звенья системы (обычно силовой цилиндр и связанные с ним непосредственно соединительные детали). В наиболее сложных случаях, когда не удается скомпоновать силовой цилиндр и распределитель в непосредственной близости один от другого для гашения автоколебаний в систему вводят гидродемпферы (амортизаторы) или гидрозамки - устройства, пропускающие жидкость в силовой цилиндр или обратно только при действии давления со стороны распределителя.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://motorzlib.ru/ 'Автомобилестроение, наземный транспорт и организация движения'